Вычислительный эксперимент в задачах оптимального проектирования управляемых систем с гидроприводами
Однокаскадные автономные электрогидравлические следящие привода (ЭГСП)
Энергетический показатель, определяемый количеством потребляемой приводом энергии в отсутствие командного сигнала
Результаты математического моделирования и оптимального проектирования двух типов автономных электрогидравлических следящих приводов
Заключение
Навигация
Вычислительный эксперимент в задачах оптимального проектирования управляемых систем с гидроприводами
Проектирование гидросистем
31705
знаков
3
таблицы
209
изображений
2. Вычислительный эксперимент в задачах оптимального проектирования управляемых систем с гидроприводами
2.1 Электрогидравлические усилители (ЭГУ)
Проектируемые ЭГУ состоят из электромеханического преобразователя (ЭМП) и распределительного золотника с управляющим каскадом (УК и РК), которые описываются системами нелинейных дифференциальных уравнений 3-го и 4-ого порядков соответственно.
Варьируемые параметры ЭМП - воздушный зазор между якорем и сердечником, число витков обмотки управления, жесткость пружины подвеса заслонки. Варьируемые параметры УК и РК - диаметр плунжера золотника, масса золотника, диаметр дросселя, диаметр сопла, расстояние между заслонкой и срезом сопла в нейтральном положении заслонки, угол наклона плоскости заслонки к оси золотника. В качестве критериев оптимальности для элементов ЭГУ были назначены критерии оценки качества. Для ЭМП - быстродействие, определяемое постоянной времени, усилие на выходном звене, крутизна статической характеристики, амплитудно-частотные и фазочастотные характеристики. Для УК и РК - быстродействие, определяемое постоянной времени, утечки в управляющем каскаде, статические характеристики, амплитудно-частотные и фазочастотные характеристики.
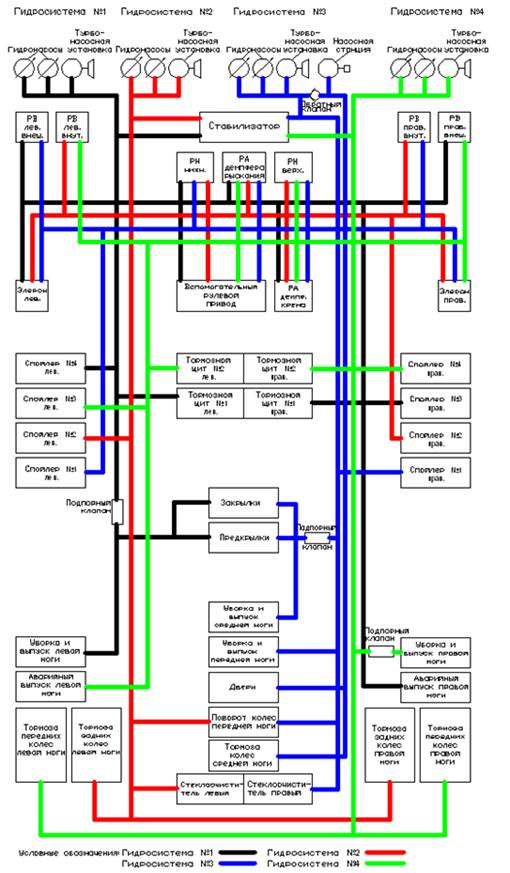
2.2 Гидросистемы
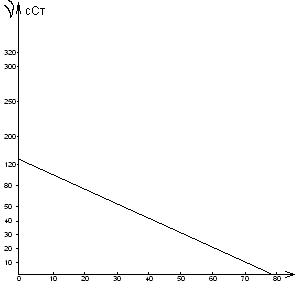
Гидросистемы с нерегулируемыми насосами. Гидросистемы энергопитания (ГСЭ) используются в управляющих системах в качестве источников питания рабочей жидкости гидроприводов. К параметрам гидросистемы отнесены давление рабочей жидкости в напорной магистрали системы, производительность насосной установки, массу насосной установки, ёмкость аккумулятора, предварительное давление в газовой камере аккумулятора, диапазон изменения рабочего давления, температура рабочей жидкости, емкость бака, а также те величины, которые зависят от условий эксплуатации гидроприводов. В качестве требований, предъявляемых к ГСЭ, которыми определяется качество системы, обычно выделяют: требования к энергетическому показателю, который должен быть достаточно высоким, малую массу, высокую надежность, низкую стоимость. В зависимости от назначения ГСЭ приоритет заданных критериев, как и их число, могут меняться. Выбор оптимального проектного варианта ГСЭ требует решения многокритериальной задачи с довольно большим числом варьируемых параметров. Задача усложнена тем, что заранее не известна оптимальная структура ГСЭ. Вследствие этого путь решения задачи состоит из двух этапов. На первом этапе проводится параметрическая оптимизации отдельных вариантов с предварительно выбранной структурой ГСЭ. На втором этапе сравниваются наилучшие варианты каждой из рассмотренных структур ГСЭ и выбирается вариант структуры и ее параметры, наиболее отвечающие требованиям к управляющему устройству.
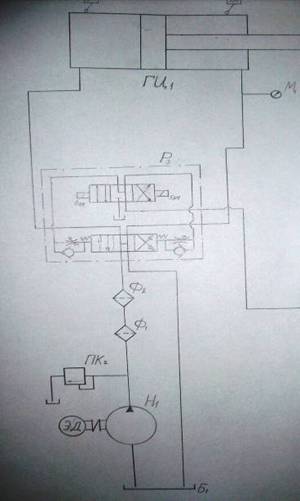
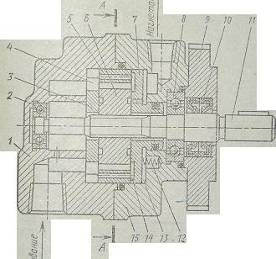
2.3 Регулятор аксиально-поршневого насоса
В качестве варьируемых параметров выбираются конструктивные параметры регулятора: жесткость пружины гидроцилиндра, коэффициент полноты использования периметра втулки золотника в левом и правом окнах, диаметр дросселя, соединяющего торцевую полость золотника с линией нагнетания насоса, сила предварительного поджатия пружины гидроцилиндра, диаметр поршня гидроцилиндра, диаметр золотника, линейный размер, определяющий суммарное открытие левой и правой кромок золотника, жесткость пружины золотника. Значения границ изменения варьируемых параметров приняты по прочностным, технологическим и другим условиям. Каждая комбинация варьируемых параметров приводит к изменению статических и динамических характеристик регулятора по отношению к исходным, а также к изменению начальных условий для решения системы дифференциальных уравнений. Для каждой пробной точки должны быть дважды вычислены начальные условия, которым на статической характеристике насоса соответствуют два равновесных состояния системы насос-регулятор: при отсутствии расхода жидкости потребителем Qs=0 и при максимальном потреблении Qs=Qsmax. Положение регулирующего органа насоса, при этих двух состояниях регулятора, определяется двумя значениями угла наклона шайбы насоса, одно из которых приведет к появлению зоны нечувствительности при управлении насоса регулятором, другое вызовет непроизводительные утечки в системе, превышающие 10%, что недопустимо требованиями по энергетике насосной станции. Для избежания автоколебательного или неустойчивого процессов, а также процессов со слабым затуханием, введено ограничение по времени переходного процесса. Недопустимые по условиям прочности повышение или понижение давления в напорной магистрали при переходном процессе, вызванном изменением расхода жидкости потребителем, могут быть исключены с помощью соответствующего функционального ограничения. Показатели качества динамических характеристик регулятора оцениваются по максимальному отклонению наклонной шайбы и времени переходного процесса давления в напорной магистрали при возмущении, вызванном ступенчатым изменением расхода потребителя. Из-за не симметрии действия сил на управляющий золотник и поршень гидроцилиндра приближенно эффективные значения некоторых параметров могут получаться различными по отношению к своим ограничениям в зависимости от уменьшении или увеличении расхода жидкости Qs. В связи с этим, динамические характеристики оцениваются по двум переходным процессам: при увеличении расхода Qs от нуля до Qsmax/2 и при уменьшении его от Qsmax до Qsmax/2. Статическая точность регулятора оценивается крутизной характеристики насоса при автоматическом регулировании его подачи.
Результаты оптимизации. У большинства проектных вариантов регулятора, наблюдается улучшение динамических характеристик за счет уменьшения времени переходного процесса и динамической ошибки. Однако, это улучшение достигается за счет увеличения расхода Qупр жидкости, необходимого для управления насосом.
Похожие работы
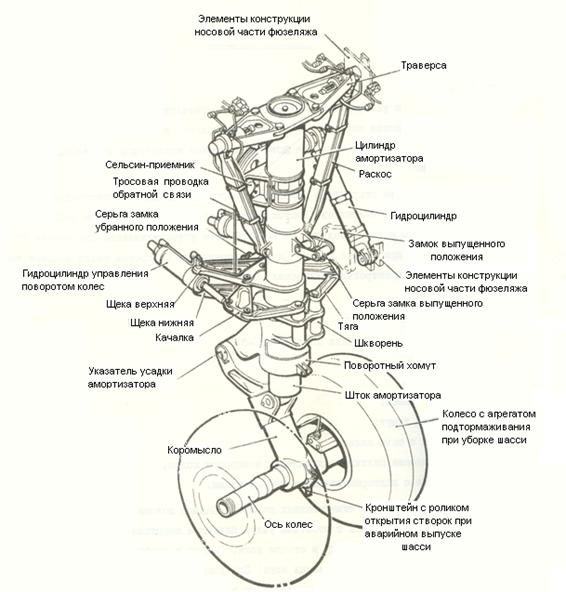
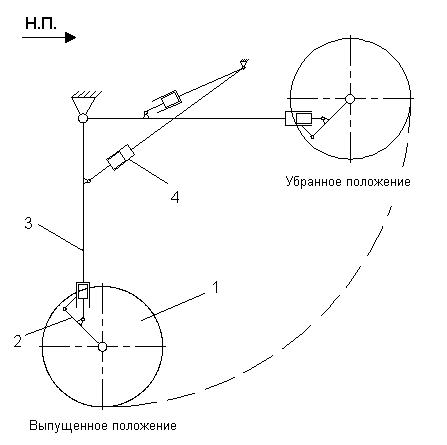
... гидронасос имеет регулятор подачи, который изменяет его подачу в зависимости от давления в системе. 3. Расчет гидроприводов 3.1 Передняя стойка шасси Рис. 3. Передняя стойка шасси Носовая нога шасси установлена в передней части фюзеляжа в плоскости симметрии самолета. Нога убирается вперед, по направлению полета, в негерметичный отсек фюзеляжа, закрываемый створками. ...


... сельскохозяйственная академия" Инженерный факультет "УТВЕРЖДАЮ" Зав.кафедрой__________ Кафедра ____________ (подпись) (название) "___"______ 200 г. ЗАДАНИЕ на дипломное проектирование студента _________________________ 1. Тема: ___________________________________________________ утверждена приказом по академии №__от "__" ________ 200 г. 2. Срок сдачи студентом законченного проекта ...
... систему охлаждения. 18. Проверить расход масла через дренажную линию. 19. Тщательно устранить наружные утечки. 4. Организация производства и экономика 4.1 Расчёт затрат на проектирование гидропривода Затраты на проектирование складываются из затрат на выполнение проектных работ и накладных расходов. 1. Расчет затрат на выполнение проектных работ. Общий фонд зарплаты разработчиков ...
... 1500*2500 3,75м 3,75м настольно-сверлильный станок 1 стационарный 1000*1500 1,5м 1,5м подставка под настольное оборудование 1 стационарный 1000*1600 1,6м 1,6м итог: 31,14м.кв. 2.2. ЭКОНОМИЧЕСКИЙ РАСЧЕТ При проектировании участка предлагается рассчитать основные технико- экономические показатели деятельности участка. Для этого предлагается провести расчет стоимости 1 нормо- часа ...
0 комментариев