Навигация
Определение предельных режимов работы станка
20431
знак
6
таблиц
15
изображений
3.2 Определение предельных режимов работы станка
3.2.1 Определение предельных значений режимов резания
По каталогу “Станкин” скорость резания при фрезеровании алюминия фрезой диаметром d=40 тв. сплавной с покрытием, при S=0.2, V=1100 м/мин.
С помощью пакета программ “Станкин” [7] рассчитываем составляющие сил резания, максимальные момент и мощность:
| Dф=40 мм | |
| Рx, Н | 264 |
| Рy, Н | 211 |
| Рz, Н | 528 |
| М, Н×м | 10,561 |
| Nэф, кВт | 9491 |
При нарезании резьбы скорость резания принимаем по каталогу“Станкин” V=12,6 м/мин и V=12,6 м/мин при обработке стали метчиком d=6мм и d=16мм соотвественно.
| Dс=6 мм | Dс=16 мм | |
| Рx, Н | 34,8 | 1058,4 |
| Рy, Н | 223,7 | 1446,7 |
| Рz, Н | 655,7 | 3126,3 |
| М, Н×м | 1,107 | 18,298 |
| Nэф, кВт | 0,076 | 1,139 |
3.2.2 Определение предельных частот вращения шпинделя
Частоту вращения шпинделя рассчитываем по следующей формуле:
![]() , (1)
, (1)
При фрезеровании n=9000 об/мин.
При нарезании резьбы n=35,5 об/мин.
3.3 Технические характеристики станков-аналогов
Технические характеристики станков-аналогов приведены в таблице 5.
Таблица 5
Технические характеристики станков-аналогов
| Модель станка-аналога | nmax, об мин | nmin, об мин | N, кВт |
| КМЦ-600 | 3000 | 21.2 | 14 |
| 2Д450 | 4000 | 40 | 3 |
| 6Н81 | 4000 | 40 | 7.5 |
Сравнивая значения технических характеристик проектируемого модуля и станков-аналогов, приходим к выводу, что разрабатываемый модуль будет отличаться не очень широким диапазоном регулирования в области завышенных частот. Мощность электродвигателя целесообразно принять равной N=8,5 кВт.
4 Определение компоновок станка и модуля
В процессе составления компоновки станка принимаем во внимание типовые компоновки на примере станков-аналогов. Наиболее приемлемой представляется компоновка со встроенным приводом, позволяющая сократить число составных частей и деталей станка.
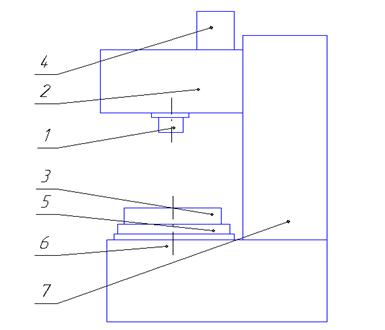
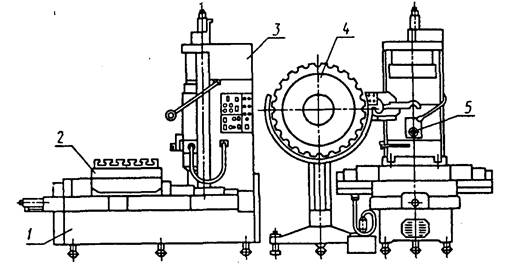
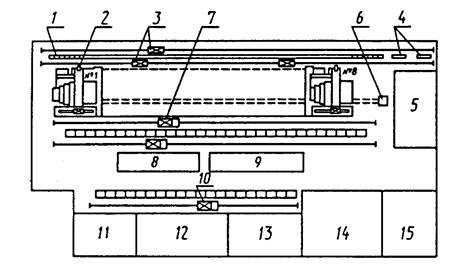
Рис 4. Общая компоновка станка
1-шпиндель
2-шпиндельная бабка
3-поворотный стол
4-электродвигатель
5-продоьлные салазки
6-станина
7-колонна
5 Разработка кинематической схемы модуля
5.1 Выбор электродвигателя
На основании полученных данных (п.3.2.2.):
nmax =9000 об/мин
nmin =35,5 об/мин
N=8,5кВт.
Mэmax=18 Нм,
з предложенного перечня двигателей выбираем электродвигатель 1PH7103-NG (двигатель постоянного тока с бесступенчатым регулированием).
| Nном, кВт | 8,5 |
| nэд max об/мин | 7500 |
| nном об/мин | 2000 |
| M, Н×м | 33 |
5.2 Определение диапазонов регулирования с постоянной мощностью и постоянным моментом
5.2.1 Определение диапазона регулирования частот вращения шпинделя
Диапазон регулирования электродвигателя определяем по формуле:
 (2)
(2)
5.2.2 Определение диапазонов регулирования с постоянной мощностью и постоянным моментом
Диапазон регулирования с постоянной мощностью определяем по формуле:
 (3)
(3)
где b=4 для многоцелевых станков.
С учётом найденных параметров технических характеристик и типа привода

Диапазон регулирования с постоянным моментом определяем по формуле:
 (4)
(4)

5.3 Определение ряда регулирования переборной коробки
5.3.1 Предварительное определение ряда регулирования переборной коробки
Первоначально знаменатель ряда, принимается равным диапазону регулирования двигателя с постоянной мощностью (RЭР), и должен быть меньше него, как минимум на 5%.
 (5)
(5)
![]() (6)
(6)
Похожие работы
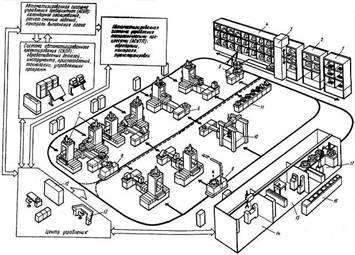
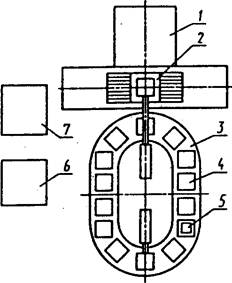
... элемент, который может быть самостоятельно разработан, изготовлен и внедрен, однако присущие ему функции он может выполнять только в составе модуля. Агрегатно-модульный принцип построения гибких производственных систем обеспечивает построение станочного модуля, в наибольшей степени приспособленного для изготовления деталей заданных конфигураций и размера (по числу и виду координат, их взаимному ...

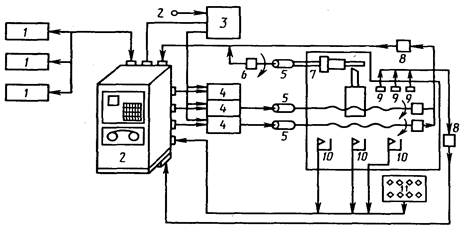
... ограничения max давления в системе либо для подержания постоянного давления. Делят на: - предохранительные - переливные Коммуникационная часть и группа управления сигналами В станках с программным управлением, копировальными устройствами и электрогидравлическими сидящими системами, а так же в промышленных работах применяются дросселирующие распределители, гидроаппаратура с пропорциональным ...
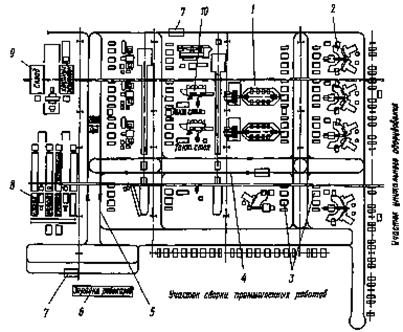
... разметочных, контрольных и других операций по технологическому потоку. Выбор структуры (компоновки) ГПМ механообработки в общем виде производится с учетом анализа деталей, подлежащих механической обработке; действующего ТП; основного технологического оборудования с учетом возможности его автоматизации; организационных видов производств (серийность, партионность, межстаночное транспортирование); ...


... ряде прикладных программ. Сферы применения Лиспа многообразны: наука и промышленность, образование и медицина, от декодирования генома человека до системы проектирования авиалайнеров. 3. Технологическая реализация системы подготовки обработки детали станка с ЧПУ 3.1 Описание кодов программного модуля Любой проект в Delphi состоит из нескольких частей (набора файлов, каждый из которых ...
0 комментариев