Навигация
Уточнение знаменателя ряда регулирования коробки и диапазонов регулирования
20431
знак
6
таблиц
15
изображений
5.3.2 Уточнение знаменателя ряда регулирования коробки и диапазонов регулирования
При округлении числа ступеней коробки в большую сторону фактический знаменатель ряда уменьшается. Необходимо уточнить его значение.
![]() (7)
(7)
![]()
Диапазоны регулирования необходимо уточнить по принятому окончательно значению знаменателя.
![]() (9)
(9)
![]()
 (10)
(10)
5.4 Уточнение характеристик электродвигателя
С уменьшением знаменателя ряда частот коробки диапазон регулирования привода по полю может быть уменьшен до значения jК, поэтому максимальная частота вращения электродвигателя снижается:
![]() (11)
(11)
![]()
Минимальная частота вращения электродвигателя определяется диапазоном регулирования привода с постоянным моментом.
5.5 Выбор типа привода
Для заданного числа ступеней коробки предпочтительным является использование встроенного привода с автоматической переборной коробкой с использованием подвижных блоков колёс перемещаемых с помощью кулачкового механизма. В данном случае приемлем вариант с нормальной структурой: 1*2*2=4.
5.6 Составление структурной сетки привода
Для выбранной структуры привода главного движения выбирается прямой кинематический порядок привода: 1*2*2=4.
В соответствии с этим структурная сетка привода будет выглядеть так:
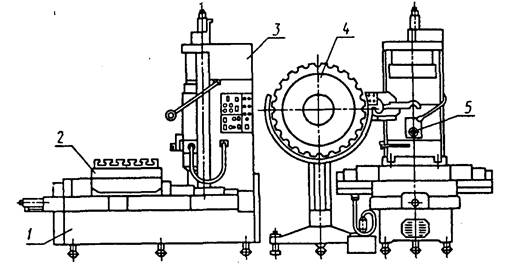
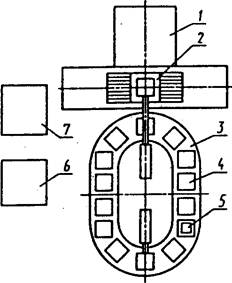
Окончательно принимаем следующую кинематическую схему. Кинематическая схема привода модуля главного движения показана на рисунке 6.
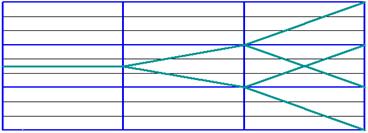
Рис. 5 Структурная сетка
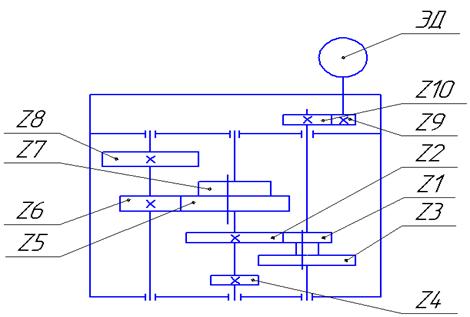
Рис 6. Кинематическая схема привода модуля главного движения
5.7 Построение графика частот вращения шпинделя
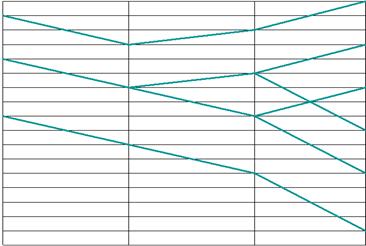
Рис 7. График частот вращения шпинделя
5.8 Определение передаточных отношений шпинделя
С помощью графика частот (Рис 7.) определяем все передаточные отношения.
![]()
![]()
![]()
![]()
![]()
5.9 Определение чисел зубьев передач
Исходя из значений передаточных отношений, определим числа зубьев передач табличным методом.
Суммарное число:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
6 Расчёты и разработка конструкции модуля с применением ЭВМ
6.1 Расчёт мощности на валах
Мощность на i-том валу:
![]()
где ![]() - коэффициент потери мощности для i-того вала.
- коэффициент потери мощности для i-того вала.
Коэффициенты принимаются по рекомендациям [2]
Для первого вала:
![]() ;
;
где ![]() - КПД пары подшипников, рекомендуют
- КПД пары подшипников, рекомендуют ![]() ;
; ![]() ;
;
![]() - КПД зубчатой постоянной передачи, рекомендуют
- КПД зубчатой постоянной передачи, рекомендуют![]() ;
;![]() ;
;
![]()
Для второго вала:
![]()
Для третьего (шпиндель) вала:
![]()
6.2 Выбор расчётной цепи
За расчетную цепь принимаем нижнюю ветку графика от номинальной частоты вращения двигателя. В качестве расчетных частот для определения максимальных моментов на валах примем:
n1=1120 об/мин
n2=560 об/мин
n3=140 об/мин
Похожие работы
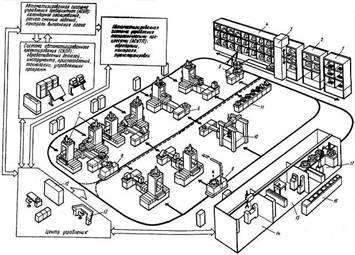
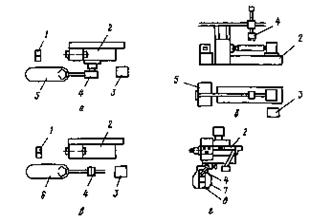
... элемент, который может быть самостоятельно разработан, изготовлен и внедрен, однако присущие ему функции он может выполнять только в составе модуля. Агрегатно-модульный принцип построения гибких производственных систем обеспечивает построение станочного модуля, в наибольшей степени приспособленного для изготовления деталей заданных конфигураций и размера (по числу и виду координат, их взаимному ...

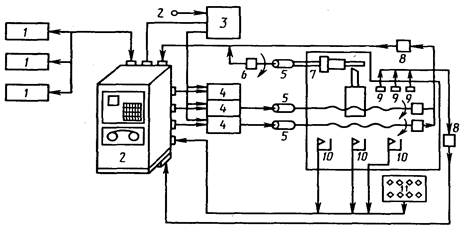
... ограничения max давления в системе либо для подержания постоянного давления. Делят на: - предохранительные - переливные Коммуникационная часть и группа управления сигналами В станках с программным управлением, копировальными устройствами и электрогидравлическими сидящими системами, а так же в промышленных работах применяются дросселирующие распределители, гидроаппаратура с пропорциональным ...
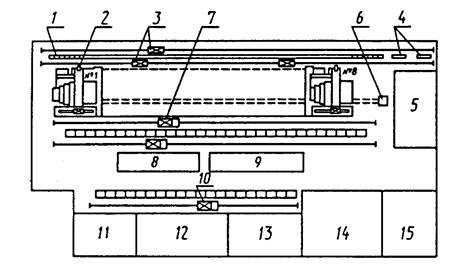
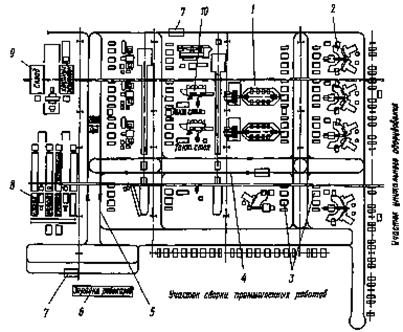
... разметочных, контрольных и других операций по технологическому потоку. Выбор структуры (компоновки) ГПМ механообработки в общем виде производится с учетом анализа деталей, подлежащих механической обработке; действующего ТП; основного технологического оборудования с учетом возможности его автоматизации; организационных видов производств (серийность, партионность, межстаночное транспортирование); ...
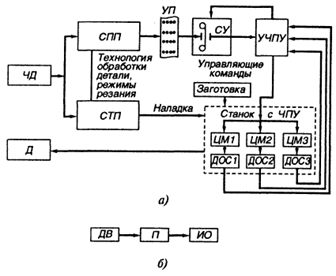


... ряде прикладных программ. Сферы применения Лиспа многообразны: наука и промышленность, образование и медицина, от декодирования генома человека до системы проектирования авиалайнеров. 3. Технологическая реализация системы подготовки обработки детали станка с ЧПУ 3.1 Описание кодов программного модуля Любой проект в Delphi состоит из нескольких частей (набора файлов, каждый из которых ...
0 комментариев