Расчет на прочность зубчатых передач
Определение начального (делительного) диаметра шестерни
Проверка передачи на изгибную прочность
Проектировочный расчет II-ой ступени
Проверочный расчет II-ой ступени
Проверка передачи на изгибную прочность
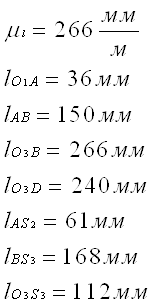
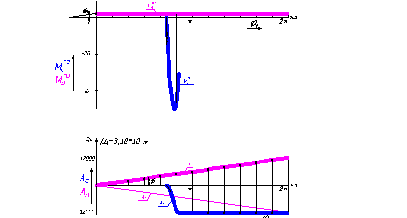
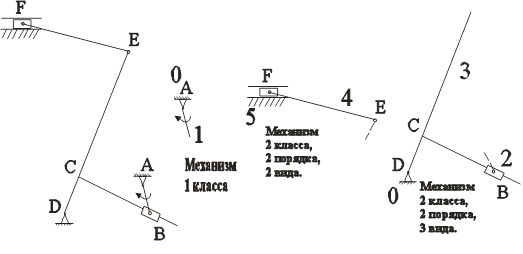
Силовой анализ рассматриваемого механизма
Проверочный расчет заднего вала винтовентилятора
Проектирование оси сателлита
Проверочный расчет шарикового радиально-упорного подшипника
Проверочный расчет шлицевых соединений на прочность
Принцип работы редуктора
Навигация
Проверочный расчет шлицевых соединений на прочность
Проектирование планетарного редуктора Д-27
37792
знака
2
таблицы
12
изображений
6.2 Проверочный расчет шлицевых соединений на прочность
Для передачи крутящего момента в машиностроении часто используют шлицевые соединения. Они имеют ряд преимуществ по сравнения с другими видами соединения: высокая прочность зубьев на изгиб и на смятие; возможность передачи большего крутящего момента и т.д.
Рассчитаем шлицевое соединение для передачи крутящего момента от вала турбины, к редуктору используя эвольвентный профиль зубьев.
Расчет заключается в определении минимальной длины шлицов, необходимой для передачи крутящего момента. Расчет проводится на смятие по боковым поверхностям зубьев.
Расчёт шлицов на заднем хвостовике вала-рессоры которые передают крутящий момент ротора компрессора:
 ,
,
Расчет шлицев шестерни 105х5х38 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
Расчет шлицев заднего вала 170х2,5х28 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
Расчет шлицев переднего вала 110х3х120 ГОСТ 6033-80:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() - условие выполняется
- условие выполняется
7. Техническое описание редуктора
7.1 Описание редуктора
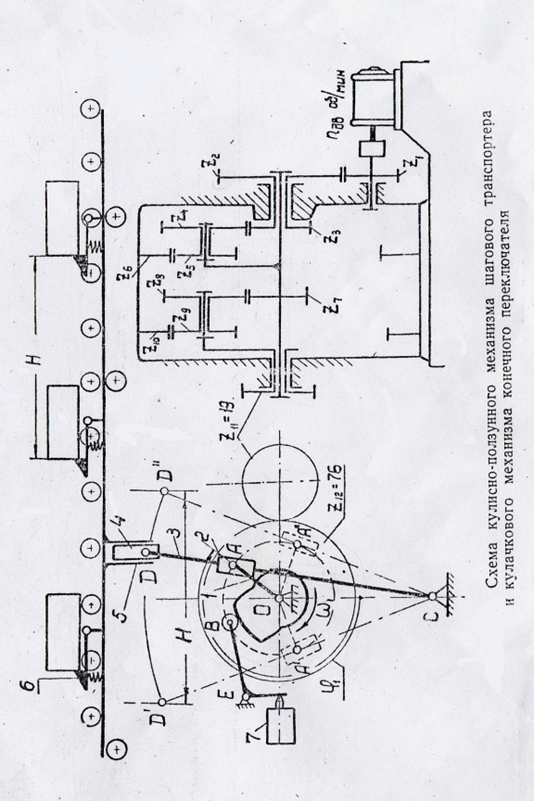
Редуктор (рис7.1) предназначен для передачи мощности турбины винтовентилятора на два соосных винтовентилятора. Винтовентиляторы вращаются в противоположные стороны с частотой, меньшей в 6,667 раза частоты вращения ротора турбины винтовентилятора. На передний винтовентилятор передается 57,86% мощности турбины, на задний 42,14% при равных частотах вращения винтовентиляторов. Редуктор однорядный планетарный дифференциального типа, расположен в передней части двигателя.
Редуктор состоит из корпуса 25 сателлитов, пяти сателлитов 12, венца (колеса внутреннего зацепления) 11, вала 1 винта, гидравлического измерителя 4 тяги, корпуса 6 редуктора, диафрагмы 24. Корпус 25 сателлитов соединен с передним винтовентилятором шлицами и опирается спереди на вал переднего винтовентилятора, а сзади - на шариковый подшипник 14. Осевые нагрузки от корпуса сателлитов передаются на вал винта межвальным шариковым подшипником 29. На корпусе 25 сателлитов установлена шестерня 15, которая служит для привода регулятора частоты вращения переднего винтовентилятора и обеспечения кинематической связи с валиком стояночного тормоза переднего винтовентилятора. Эта шестерня является также индуктором для датчиков 13 частоты вращения и синхрофазирования переднего винтовентилятора. В корпусе сателлитов установлены пять сателлитов 12 на двух роликовых подшипниках 10 каждый.
В зацеплении с сателлитами 12 находится ведущая шестерня 23, которая установлена на валопровод 22. Валопровод 22 соединяется с валом 19 турбины винтовентилятора шлицами и винтовым замком 20. Валопровод 22 установлен на двух подшипниках - шариковом 17 и межвальном роликовом 18. На валопроводе 22 также установлена шестерня 16, служащая для привода регулятора частоты вращения заднего вштовентилятора, самолетных агрегатов и обеспечения кинематической связи с валиком стояночного, тормоза заднего винтовентилятора.
Сателлиты в свою очередь зацепляются с венцом 11 (колесом внутреннего зацепления). Венец 11 соединен шлицами со ступицей 5, закрепленной на валу 1 винта.
Вал винта установлен в корпусе редуктора 6 на двух роликовых подшипниках 30 и 26, воспринимающих все радиальные нагрузки от переднего и заднего винтовентиляторов. На валу винта установлены также два шариковых подшипника 27, воспринимающие и передающие силу тяги винтовентилятора на корпус редуктора 6 через гидравлический измеритель тяги 4. К фланцу вала 1 винта крепится корпус заднего винтовентилятора.
Подвод масла на управление винтовентилятором от регулятора частоты вращения винтовентилятора обеспечивается маслоперепусками: поз.З на валу 1 винта для заднего и поз.21 на корпусе 25 сателлитов для переднего (канат Б1 Ф1 М1 и Б2, Ф2, М2 соответственно).
Каналы управления винтовентилятором расположены в редукторе и непосредственно в винтовентиляторе, и соединяются следующим образом: подводящие масло к заднему винтовентилятору - через втулки 32, а к переднему - через маслоперепускную втулку 33. Корпус 6 редуктора крепится на переднем корпусе 9 двигателя с помощью шпилек 7, и при этом центрируется по втулкам 8. Стык корпусов уплотняется резиновым кольцом. В передней части корпуса 6 редуктора расположены: бобышки со шпильками 2 для крепления воздухозаборника; крышка 36 редуктора с безрасходным уплотнением 31, на которой предусмотрены места для крепления винтами 37 коробок щеткодержателей токосъемников системы обогрева лопастей винтовентилятора; три датчика 35 частоты вращения заднего винтовентилятора; один датчик 28 системы синхрофазирования, а также датчик вибраций МВ - 0,4. Индуктор 34 для датчиков частоты вращения и синхрофазирования установлен на валу 1 винта. Сзади на корпусе 6 редуктора установлена диафрагма 24, в которой размещается подшипник 14.
Внутри корпуса редуктора 6 установлен -гидравлический измеритель 4 тяги.
Измеритель тяги предназначен для измерения величины положительной и отрицательной тяги винтовентилятора, а также для уравнивания загрузки упорных подшипников.
Положительная сила тяги передается на корпус I (рис7.2 ) редуктора от вала 14 винта через подшипники 10, 13 и через корпус 15 измерителя тяги.
В корпусе 15 измерителя тяги установлены равнорасположенные по окружности четыре цилиндра 2 - с пазами на выступающей части, а между цилиндрами 2 установлены четыре цилиндра 16 - без пазов. В цилиндрах 2 установлены поршни 5 с короткими хвостовиками, а в цилиндрах 16 установлены поршни 17 с длинными хвостовиками. Поршни 5 упираются во фланец 12 подшипника 13, а поршни 17 -во фланец 11 подшипника 10. Рабочие полости Б всех цилиндров связаны каналами между собой и соединены через трубопровод и каналы в переднем корпусе двигателя с маслонасосом 4 и информационной системой, измерения давлений 3 двигателя, а на летающей лаборатории - дополнительно с соответствующим датчиком давления 19.
Отрицательная сила тяги передается на корпус 1 редуктора от вала 14 винта через подшипник 10 и через корпус 8 опоры вала винта. В корпусе 8 установлены четыре цилиндра 6 (аналогичных, цилиндрам 2), а в них соответственно четыре поршня 7 (аналогичных поршням 5). Поршни 7 упираются во фланец 11 подшипника 10, Рабочие полости В всех цилиндров связаны каналами между собой 1 и соединяются через трубопровод и каналы в переднем корпусе двигателя с маслонасосом и информационной системой измерения давлений 3 двигателя, а на летающей лаборатории - дополнительно с соответствующим датчиком давления 19.
Похожие работы
... рассчитанными длинами звеньев вычерчен на листе №1 формата А1. 2.2 Построение графика силы сопротивления Механическая характеристика, т.е. зависимость силы сопротивления от перемещения верхнего ножа аллигаторных ножниц строится по диаграмме усилия реза, представленной на рис.1б: сначала по заданной координате находится положение разрезаемого металла (точка К) и в масштабе вычерчивается его ...
... сателлитов 3. Подбор чисел зубьев колес методом сомножителей: 1) Передаточное отношение планетарного механизма: ; 2) Выражение дроби и представление ее в виде отношения произведения сомножителей: Необходимо выбрать один из возможных вариантов, удовлетворяющий всем условиям проектирования планетарных редукторов, а также наиболее подходящий по соображениям габаритности. 3) Проверка ...

... : Массы звеньев: Моменты инерции звеньев: После подстановки значений рассчитанных величин получим следующую формулу: 2.4.4 Расчет приведенных моментов сил На входное звено крышкоделательной машины при рабочем ходе действует сила полезного сопротивления P n.с.=500 H. Величину приведенного момента сил сопротивления определяем по формуле: Определим ...
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
0 комментариев