Расчет на прочность зубчатых передач
Определение начального (делительного) диаметра шестерни
Проверка передачи на изгибную прочность
Проектировочный расчет II-ой ступени
Проверочный расчет II-ой ступени
Проверка передачи на изгибную прочность
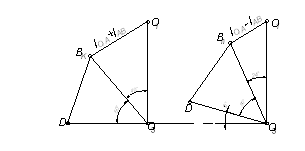
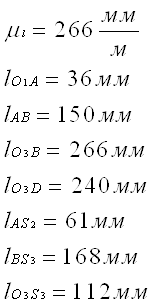
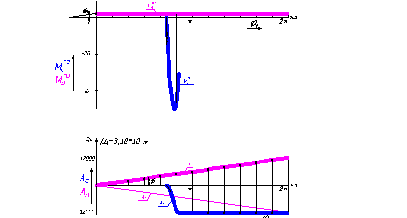
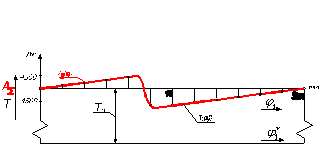
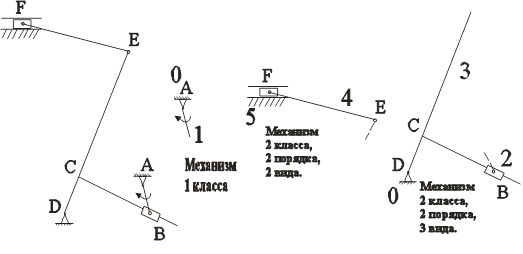
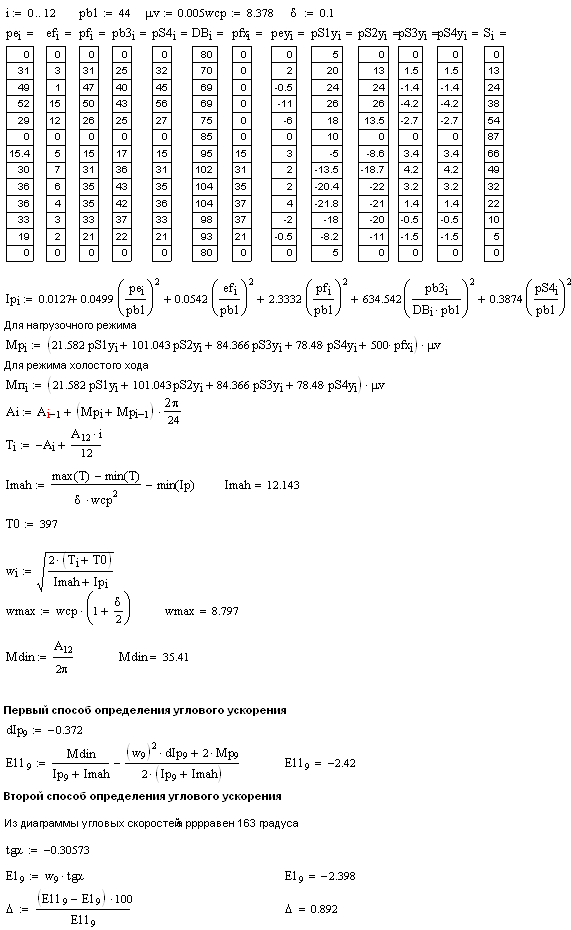
Силовой анализ рассматриваемого механизма
Проверочный расчет заднего вала винтовентилятора
Проектирование оси сателлита
Проверочный расчет шарикового радиально-упорного подшипника
Проверочный расчет шлицевых соединений на прочность
Принцип работы редуктора
Навигация
Принцип работы редуктора
Проектирование планетарного редуктора Д-27
37792
знака
2
таблицы
12
изображений
7.2 Принцип работы редуктора
Крутящий момент от турбины винтовентилятора передается через вал 19 турбины винтовентилятора на валопровод 22 (рис7.1) и ведущую шестерню 23. Далее крутящий момент разделяется на два потока. От сателлитов (поз.12) 57,86% суммарного крутящего момента передается переднему винтовентилятору через корпус 25 сателлитов. Второй поток крутящего момента (42,14% суммарного) передается от венца 11 на задний винтовентилятор валом 1 винта. Сила тяги винтовентилятора передается от вала 1 винта на корпус 6 редуктора двумя шариковыми подшипниками 27 через гидравлический измеритель 4 тяги.
Измеритель тяги (рис7.2) работает следующим образом. При работе двигателя приводится во вращение установленный на коробке приводов маслонасос 4 измерителя тяги. Если сила тяги винтовентилятора отсутствует, то масло из полостей Б и В сливается во-внутреннюю полость корпуса редуктора через отверстия А в поршнях 5 и 7.
При возникновении на валу 14 винта положительной тяги ( + ![]() ), она передается подшипником 13 на фланец 12 и подшипником 10 на фланец 11, а далее соответственно на поршни 5 и 17. Поршни 5 и 17 под действием силы тяги перемещаются внутрь цилиндров 2 и 16, при этом цилиндры 2 перекрывают каналы А в поршнях 5 и слив масла уменьшается. При этом давление в полостях Б увеличивается до величины, уравновешивающей силу тяги. Суммарная площадь поршней 5 и 17 - 169,8 см2. При действии положительной тяги измеритель тяги обеспечивает равномерную загрузку подшипников 13 и 10 за счет параллельной работы поршней 5 и 17 от общей гидравлической полости. При повышении давления в канале положительной тяги до 700 кПа (7 кгс/см2) золотник, установленный в маслонасосе 4 между каналами положительной и отрицательной тяги, перекрывает канал отрицательной тяги, что позволяет избежать лишней циркуляции масла в корпусе редуктора. При появлении на валу 14 винта отрицательной тяги ( —
), она передается подшипником 13 на фланец 12 и подшипником 10 на фланец 11, а далее соответственно на поршни 5 и 17. Поршни 5 и 17 под действием силы тяги перемещаются внутрь цилиндров 2 и 16, при этом цилиндры 2 перекрывают каналы А в поршнях 5 и слив масла уменьшается. При этом давление в полостях Б увеличивается до величины, уравновешивающей силу тяги. Суммарная площадь поршней 5 и 17 - 169,8 см2. При действии положительной тяги измеритель тяги обеспечивает равномерную загрузку подшипников 13 и 10 за счет параллельной работы поршней 5 и 17 от общей гидравлической полости. При повышении давления в канале положительной тяги до 700 кПа (7 кгс/см2) золотник, установленный в маслонасосе 4 между каналами положительной и отрицательной тяги, перекрывает канал отрицательной тяги, что позволяет избежать лишней циркуляции масла в корпусе редуктора. При появлении на валу 14 винта отрицательной тяги ( — ![]() ) она передается подшипником 10 на фланец 11, который болтами 18 крепится к фланцу 9, установленному на наружной обойме подшипника 10. Фланец 11 под действием отрицательной тяги перемещает поршни 7 вовнутрь цилиндров 6, которые перекрывают в поршнях 7 отверстия А для слива масла. Одновременно поршни 5 и 17 силой давления масла в полостях Б выдвигаются из цилиндров 2 и 16. При этом открываются отверстия А в поршнях 5 и давление тела в канале положительной тяги понижается, после чего золотник, установленный между каналами в маслонасосе 4, открывает канал отрицательной тяги. Масло поступает в полости В, давление в которых увеличивается до величины, уравновешивающей силу отрицательной тяги. Суммарная площадь поршней 7 - 84,9 см2. Давление масла в каналах измерения положительной и отрицательной тяги, как эквивалент силы тяги, измеряется информационной системой измерения давлений 3, преобразующей давление в цифровой код, выдаваемый в электронную систему управления и в бортовую систему контроля двигателя.
) она передается подшипником 10 на фланец 11, который болтами 18 крепится к фланцу 9, установленному на наружной обойме подшипника 10. Фланец 11 под действием отрицательной тяги перемещает поршни 7 вовнутрь цилиндров 6, которые перекрывают в поршнях 7 отверстия А для слива масла. Одновременно поршни 5 и 17 силой давления масла в полостях Б выдвигаются из цилиндров 2 и 16. При этом открываются отверстия А в поршнях 5 и давление тела в канале положительной тяги понижается, после чего золотник, установленный между каналами в маслонасосе 4, открывает канал отрицательной тяги. Масло поступает в полости В, давление в которых увеличивается до величины, уравновешивающей силу отрицательной тяги. Суммарная площадь поршней 7 - 84,9 см2. Давление масла в каналах измерения положительной и отрицательной тяги, как эквивалент силы тяги, измеряется информационной системой измерения давлений 3, преобразующей давление в цифровой код, выдаваемый в электронную систему управления и в бортовую систему контроля двигателя.
На летающей лаборатории давление масла в каналах измерения тяги дополнительно воспринимается соответствующими датчиками давления 19, которые преобразовывают давление в электрические сигналы, выдаваемые в соответствующие индикаторы (указатели).
Заключение
В данном курсовом проекте был спроектирован редуктор , выполненный по схеме дифференциального разомкнутого механизма.
Были проведены расчеты:
- планетарной ступени с проверкой на:
контактную выносливость;
изгибную выносливость;
- валов соосных винтов винта с проверкой на:
статическую прочность;
выносливость;
- осей сателлитов планетарной ступени;
- эвольвентных шлицев с проверкой на смятие.
Для зубчатого механизма были подобраны оптимальные коэффициенты смещения по контактной прочности, что позволило снизить расчетные контактные напряжения на 11,73%.
Были подобраны стандартные подшипники с последующей проверкой по динамической грузоподъемности; проверены на прочность нагруженные детали редуктора: болты с помощью которых винт крепится к переднему фланцу вала.
Были подобраны материалы для всех деталей редуктора.
Дано техническое описание редуктора, входящего в него механизма измерителя тяги, принцип его действия.
В проект включены также рабочие чертежи двух деталей: шестерни и рессоры.
Список использованной литературы
1. Расчет и проектирование зубчатых передач. Учебное пособие к курсовому проектированию по деталям машин, Харьков, ХАИ – 1980, 113с.
2. Детали машин, М.М.Иванов, М. – Высшая школа, 1964г., 448с.
3. Я.Я.Перель, Подшипники качения. Справочник, М. – Машиностроение, 1983, 543с.
4. Справочник материалов, Киев – Высшая школа, 1986, 638с.
5. В.И.Анурьев, Справочник конструктора – машиностроения, в 3-х томах, Т.1,2,3 ; М. – Машиностроение,1979.
Похожие работы
... рассчитанными длинами звеньев вычерчен на листе №1 формата А1. 2.2 Построение графика силы сопротивления Механическая характеристика, т.е. зависимость силы сопротивления от перемещения верхнего ножа аллигаторных ножниц строится по диаграмме усилия реза, представленной на рис.1б: сначала по заданной координате находится положение разрезаемого металла (точка К) и в масштабе вычерчивается его ...
... сателлитов 3. Подбор чисел зубьев колес методом сомножителей: 1) Передаточное отношение планетарного механизма: ; 2) Выражение дроби и представление ее в виде отношения произведения сомножителей: Необходимо выбрать один из возможных вариантов, удовлетворяющий всем условиям проектирования планетарных редукторов, а также наиболее подходящий по соображениям габаритности. 3) Проверка ...

... : Массы звеньев: Моменты инерции звеньев: После подстановки значений рассчитанных величин получим следующую формулу: 2.4.4 Расчет приведенных моментов сил На входное звено крышкоделательной машины при рабочем ходе действует сила полезного сопротивления P n.с.=500 H. Величину приведенного момента сил сопротивления определяем по формуле: Определим ...
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
0 комментариев