Навигация
Расчёт переходных процессов в электроприводе за цикл работы
31595
знаков
1
таблица
12
изображений
6. Расчёт переходных процессов в электроприводе за цикл работы
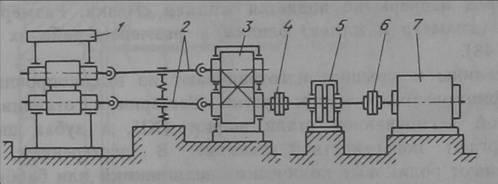
Механическая часть электропривода представлена трехмассовая расчётной схемой. Приведем обоснование перехода к одномассовой расчётной схеме.
Исходная схема:
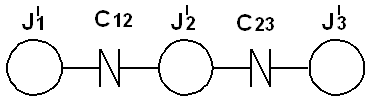
Рисунок 6 – Расчетная схема, где
:
![]() (кг*м2) (6.1)
(кг*м2) (6.1)
![]() (кг*м2) (6.2)
(кг*м2) (6.2)
![]() (кг*м2) (6.3)
(кг*м2) (6.3)
Из справочника выбераем муфты с жесткостью:
Из справочника выбераем муфты с жесткостью:
![]() (Н*м)
(Н*м)
![]() (Н*м) (6.4)
(Н*м) (6.4)
 (Н*м) (6.5)
(Н*м) (6.5)
![]() (Н*м) (6.6)
(Н*м) (6.6)
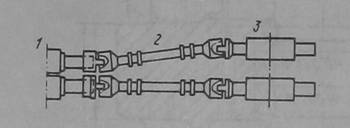
Так как ![]() и
и ![]() , то схема может быть представлена двухмассовой:
, то схема может быть представлена двухмассовой:

Рисунок 7 – Расчетная схема
![]() (кг*м2) (6.7)
(кг*м2) (6.7)
![]() (кг*м2) (6.8)
(кг*м2) (6.8)
![]() (6.9)
(6.9)
![]() (Н*м)
(Н*м)
Перейдем к одномассовой расчетной схеме, т.к.
![]() и
и ![]() (*)
(*)
Собственная частота:
 (с-1) (6.10)
(с-1) (6.10)
Желаемая частота среза:
![]() (с-1) (6.11)
(с-1) (6.11)
где: аТ, аС, bТ – коэффициенты демпфирования.
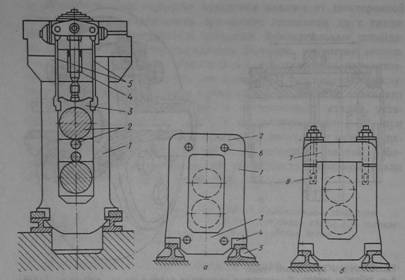
Так как выполняется условие (*) осуществляем переход к одномассовой расчетной схеме:
![]() кг*м2 (6.12)
кг*м2 (6.12)
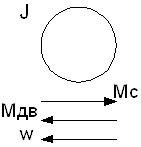
Рисунок 8 – Расчетная схема привода
Расчетная схема механической части привода приведена в графической части. Имеем систему подчиненного регулирования, состоящую из двух контуров: контура тока и контура скорости. Для получения астатической системы и точного поддержания скорости прокатки настраиваем контур тока на МО, а контур скорости на СО.
Составляем структурную схему привода:
При исследовании и расчете систем исходят из математического описания физических процессов, происходящих в них.
Структурные схемы показывают взаимосвязь составных частей и характеризуют их динамические свойства, т.е. являются графическим изображением математического описания элементов системы в динамике.
1) Структурная схема тиристорного преобразователя.
В целом тиристорный преобразователь, работающий в режиме непрерывного тока, с достаточной точностью можно представить одним динамическим безынерционным звеном с чистым запаздыванием, передаточная функция которого имеет вид:
![]() (6.13)
(6.13)
где: ![]() - общее время запаздывания;
- общее время запаздывания;
![]() -время запаздывания силового преобразователя;
-время запаздывания силового преобразователя;
![]() (с) (6.14)
(с) (6.14)
![]() - время запаздывания устройства управления;
- время запаздывания устройства управления;
С достаточной точностью тиристорный преобразователь, работающий в режиме непрерывного тока, можно представить звеном:
![]() (6.15)
(6.15)
где: ![]() (с).
(с).
Структурная схема двигателя постоянного тока при управлении напряжением якоря.
При математическом описании двигателя постоянного тока с независимым возбуждением принимаются допущения:
1) размагничивающее действие реакции якоря считается скомпенсированным;
2) индуктивность и сопротивление якорной цепи являются постоянными величинами;
3) магнитный поток линейно зависит от намагничивающей силы.
Для построения структурной схемы двигателя пишем систему дифференциальных уравнений в операторном виде:
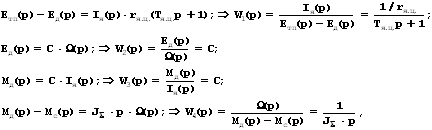
где Eтп(p)- изображение ЭДС тиристорного преобразователя;
Едв(p) - изображение противо-ЭДС двигателя;
Iя(p) - изображение тока якоря;
rя.ц. - суммарное сопротивление якорной цепи;
Тя.ц. - суммарная постоянная времени якорной цепи;
С - конструктивный коэффициент двигателя;
W(p) - изображение скорости вращения электродвигателя;
Мдв(p) - изображение момента развиваемого двигателем;
Мс(p) - изображение момента сил статических сопротивлений;
JS - суммарный момент инерции привода, приведенный к валу двигателя.
Структурные схемы регуляторов представим в виде Wрт и Wдс , которые при настройке контуров будут определены.
Датчики тока и скорости представлены в виде Кдт и Кдс .
Структурная схема привода приведена в приложении____
В данной структурной схеме учтем нелинейности регуляторов и тиристорного преобразователя. Ограничение на нелинейности тиристорного преобразователя ±Еdo.
Статическая механические характеристики замкнутой системы абсолютно жесткие.
В статике Uзт и Uост равны, следовательно:
![]() (6.16)
(6.16)
Настройка контура тока на модульный оптимум:
Постоянная времени якорной цепи:
![]() (6.17)
(6.17)
Т.к. ![]()
![]() , то в качестве некомпенсируемой постоянной времени принимаем
, то в качестве некомпенсируемой постоянной времени принимаем ![]() =
= ![]() = 0,0017(с).
= 0,0017(с).
Кроме того исследованиями установлено, что О.С. по ЭДС не существенно усложняет структуру регуляторов. Поэтому при выводе регуляторов учитываться не будет.
В данном случае объект компенсации представляет собой апериодическое звено с
![]() ,
,
поэтому должен быть использован пропорционально-интегральный (ПИ) регулятор.
 (6.18)
(6.18)
 (6.19)
(6.19)
Преобразуем полученное выражение:
 (6.20)
(6.20)
Настройка контура скорости на симметричный оптимум:
Для настройки контура скорости свернем внутренний контур тока в одно звено:
 (6.21)
(6.21)
При настройке контура скорости можно пренебречь старшими степенями:
 (6.22)
(6.22)
Необходимо условно отбросить внешние воздействия, а также разорвать обратную связь. Запишем передаточную функцию для разомкнутого контура скорости:
 (6.23)
(6.23)
Запишем передаточную функцию контура тока, настроенного на симметричный оптимум, причем ![]()
 (6.24)
(6.24)
Приравняем выражения (6.24) и (6.25):

 (6.25)
(6.25)
Из выражения (6.25) находим ![]() с учетом того, что
с учетом того, что ![]() .
.
 (6.26)
(6.26)
Для получения меньшего перерегулирования на вход системы ставим фильтр:
![]() (6.27)
(6.27)
Математическая модель привода в среде Matlab приведены в приложении___
Определяем параметры системы:
![]() (с)
(с)
![]()
![]() (Ом)
(Ом)
![]() (В/рад/с)
(В/рад/с)
![]() (Н*м/А)
(Н*м/А)
![]()
![]()
![]()
Скорость прокатки задаются автоматически:
![]()
![]() (В);
(В); ![]() (В);
(В); ![]() (В);
(В); ![]() (В)
(В)
Для обеспечения такого задания скорости на вход системы ставят программатор.
Тахограмма задания скорости – в приложении. Наброс момента осуществляется через 1с после подачи соответствующего сигнала задания скорости.
7. Проверка правильности расчета мощности и окончательный выбор двигателя
По результатам расчета переходных процессов за цикл работы можно рассчитать эквивалентный ток и следовательно проверить правильность выбора электродвигателя. Эквивалентный ток рассчитывается по следующей формуле:
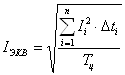 (7.1)
(7.1)
Тогда:
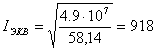 (А)
(А)
Проверим правильность выбора двигателя по коэффициенту загрузки:
![]() (7.2)
(7.2)
Откуда:
![]()
Двигатель загружен на 87,4%, что свидетельствует о правильности его выбора.
8. Разработка схемы электрической принципиальной
Разработка схемы силовых цепей
Управление выпрямителя (UZ1) подключается к промышленной сети переменного тока, через автоматический выключатель (QF1) с помощью магнитного пускателя КМ1. Выпрямленные напряжения и ток с выхода преобразователя подаются на двигатель постоянного тока М1. С целью уменьшения пульсации тока и расширение зоны коммутации двигателя в цепь нагрузки включены два сглаживающих дросселей (Lдр). Обмотка возбуждения двигателя управляется с помощью тиристорного преобразователя (UZ2).Необходимый ток возбуждения устанавливается реостатом RP1.
Управляемый выпрямитель UZ1 осуществляет управление привода. В его состав входит: трансформатор, сглаживающий реактор, шунт, предохранители, система управления (СИФУ), систему защиты, регуляторы тока и скорости. К нему подводится сигнал от датчика скорости и сигналы управления тиристорами мостами (вперед, назад).
Датчик скорости выполнен в виде тахогенератора BR1.
С помощью SB1 и SB2 производится пуск и останов привода.
Для защиты силовых цепей и цепей управления от токов короткого замыкания и перегрева применяются автоматические выключатели.
Выбор элементов схемы
1) Выбор двигателя постоянного тока М1 – МП1100-620У3(см. пункт 4.1).
2) Выбор тахогенератора BR
Выбор производим по скорости вращения
ПТ-3111 ТУ 16-512.421-77
- Ном.скорость вращения : nн=660 об/мин;
- Ном.напряжение питания : Uя=220 В;
- Ном.ток якоря : Iя=0,5 А ;
- Ном.сопротивления якорной цепи : Rя=31,1 Ом ;
3) Выбор преобразователей UZ1, UZ2 тиристорный преобразователь ТПП1 (см. пункт 4.2).
4) Выбор сглаживающего дросселя:
Выбираем сглаживающий дроссель СРОС3-800МУХЛ4 (см. пункт 5).
5) Выбираем автоматический выключатель А3730Ф (ТУ 16-522.064-82) со следующими характеристиками:
1. ![]()
2. ![]()
3. ![]()
Заключение
В ходе выполнения данного курсового проекта последовательно были пройдены все этапы проектирования электропривода: произведен выбор двигателя, определен наиболее приемлемый вариант решения поставленной технической задачи; составлена техническая документация.
Итогом выполнения данного проекта стала работоспособная система электропривода, удовлетворяющая своими характеристиками техническому заданию.
Список литературы
1. Теория электрического привода. Методические указания по курсовому проектированию Часть I. Могилев.: ММИ, 1991,–65с.
2. Справочник по автоматизированному электроприводу/ Под ред. В.А. Елисеева и А.В. Шинянского.–М.: Энергоатомиздат, 1983.– 616 с.
3. Ключев В. И. Теория электропривода: Учебник для вузов.– М.: Энергоатомиздат, 1985.– 550 с.
4. Комплектные тиристорные преобразователи/ Под ред. В.М. Перельмутера. М.: Энергоатомиздат. 1988.– 318 с.
5. Конспект лекций и практических занятий по курсу ТЭП/ Под ред. Слуки М.П. и Скарыно Б.Б.–Могилев: Самиздат. 2000. сколько страниц не считал (почти три общих тетрадки).
Похожие работы
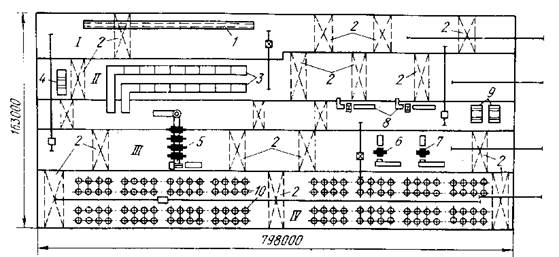
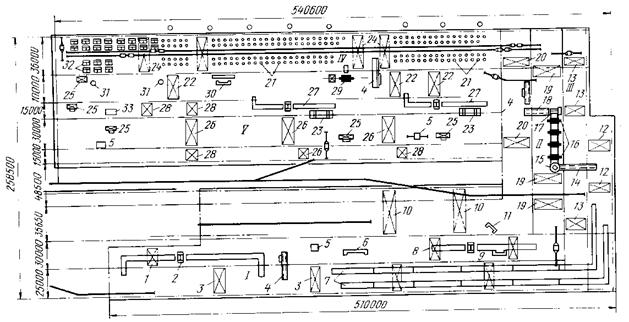
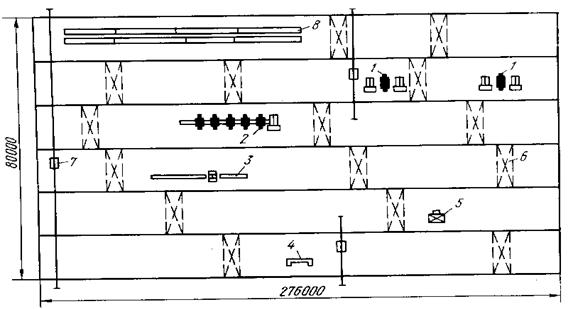
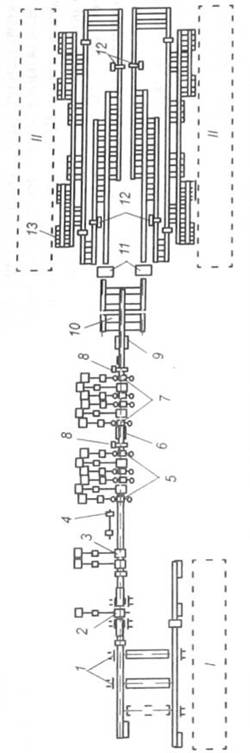
... Первая очередь цеха холодной прокатки введена в эксплуатацию в 1963 г., оборудование стана расположено в 12 пролетах (Рисунок 2). Рисунок 2. Схема расположения основного технологического оборудования стана холодной прокатки 1700 Мариупольского металлургического комбината им. Ильича: I - склад горячекатаных рулонов, II - пролет стана, III - машинный зал, IV - пролет газовых колпаковых печей, ...
... - 77 и др. или ТУ. В заводских технологических инструкциях обычно приводятся более подробные данные о допустимой величине поверхностных дефектов на используемых заготовках, установленные с учетом специфики технологии производства проката на сортовых станах, условий нагрева металла, применяемых систем калибровок валков, средств отделки готовой продукции и т.д. Стандартизованы также требования к ...
... 868 1242 2 2,8 1,7 40 1,1 1,67 1242 2074 3 1,7 1,2 30 0,5 1,43 2074 2966 4 1,2 1,0 15 0,2 1,18 2966 3474 1.5. Технологический процесс производства Горячекатаная полоса в рулонах массой 30 т поступает в цех холодной ...
... повысить пластичность поверхностных слоев на 40%. Это позволяет на 10-15% снизить энергозатраты на прокатку. Применение технологических смазок Применение традиционных смазочных материалов (минерального, растительного масла, синтетических смазок с содержанием поверхностно-активных веществ и др.) на толстолистовых станах трудно реализуемо из-за дефицитности и недостаточной эффективности, ...
0 комментариев