Навигация
2. Практический раздел
2.1 Требование к электроприводу механизмов экскаватора
Основным требованием к электроприводу механизма поворота является обеспечение протекания переходных процессов в минимально возможное время с ограниченным ускорением или замедлением, в особенности при торможении. Такое требование вызвано тем, что механизм поворота работает исключительно в переходных процессах пуска, реверсирования и торможения, так как он обладает значительной массой, которая в несколько раз превышает маховую массу двигателя. Кроме того, вследствие большого передаточного отношения редуктора механизма поворота могут быть значительные люфты в передачах, что тоже требует плавного разгона во избежание резких ударов в передачах.
Механизм подъема работает в условиях резко переменной нагрузки, значительно превышающей номинальную. В отдельных случаях нагрузка может быть настолько велика, что возникает опасность разрушения отдельных звеньев механической передачи. Еще тяжелее условия работы механизма напора. Наиболее характерной особенностью работы этого механизма является возможность его вынужденной остановки во время работы в случае встречи ковша с непреодолимым препятствием. Такой режим работы называется работой на упор или стопорением. Следовательно, для обеспечения надежной и безаварийной работы рабочего механизма требуется снижение момента до допускаемых пределов при стопорении и известная податливость его приводного двигателя.
2.2 Выбор рода тока и величины питающих напряжений
На экскаваторах средней мощности применяются многодвигательный электропривод постоянного тока, который имеет преобразовательную установку, состоящую из трехфазного сетевого двигателя и нескольких генераторов постоянного тока – для питания двигателей главных механизмов. Для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
В качестве приводного двигателя и для вспомогательных механизмов применяются асинхронные двигатели с короткозамкнутым ротором.
Энергия к экскаватору, находящемуся в забое, подводится гибким четырехжильным кабелем, подключаемым через передвижной приключательный пункт к внутрикарьерной линии электропередач на напряжение – 6 кВ. По трем жилам кабеля осуществляется питание электрооборудования, а четвертая жила служит для надежного заземления корпуса экскаватора.
Питание двигателей вспомогательных механизмов осуществляется на напряжение 0,4 кВ, получаемое от трансформатора собственных нужд, установленном в передвижном приключательном пункте.
2.3 Выбор системы электропривода и методов регулирования скорости
Требуемые механические экскаваторные характеристики приводов главных рабочих механизмов экскаватора легче всего осуществить, когда каждый главный рабочий механизм: подъем, поворот, напор или тяга, оборудуются двигателем постоянного тока независимого возбуждения, питающихся от отдельного источника питания – генератора постоянного тока, напряжение которого можно плавно регулировать от нуля до полной величины ±Uг с помощью реостата. Такая система регулируемого электропривода называется системой генератор – двигатель и сокращенно обозначается Г-Д.
Генераторы приводятся во вращение приводным двигателем, частота вращения которого не изменяется. В качестве приводного двигателя, на карьерных экскаваторах применятся асинхронные двигатели с короткозамкнутым ротором.
2.4 Расчет мощности двигателей привода механизма экскаватора
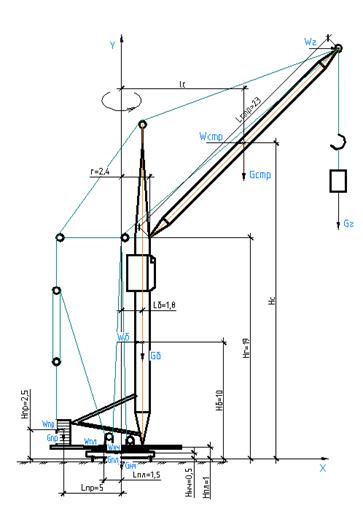
Расчет мощности двигателей главных приводов механизмов выполняются на основе кинематической схемы с использованием эмпирических формул.
Мощность двигателя подъемного рассчитывается по формуле:
![]() , кВт
, кВт
![]() , кВт
, кВт
где Gк – вес порожнего ковша, кг
Gr – вес грунта в ковше, кг
Gp – вес рукояти, кг
F – сила сопротивления грунта копанию, кгс
υч – скорость копания грунта, т.е. скорость подъема ковша при копании, мм2
V – емкость ковша, м2
kp – коэффициент разрыхления грунта
h – высота копания, м
Определяется мощность двигателя исходя из того, что давление ковша экскаватора на забой Fн, создаваемое напорным механизмом, ровно 0,6 от тягового усилия на подъемном канате, т.е.
![]()
![]() =15170,4
=15170,4
Скорость перемещения рукоятки определяем исходя из перемещение рукояти при копании на 0,75 ее длины за время копания:
![]() , мсек
, мсек
где ![]() – длина рукояти, м
– длина рукояти, м
tk – время копания, сек
Таким образом, мощность двигателя напорного механизма:
![]() , кВт
, кВт
![]() , кВт
, кВт
где ηн – к.п.д. напорного механизма.
Статическая мощность поворотного двигателя
![]() , кВт
, кВт
![]() , кВт
, кВт
где n – наибольшая скорость вращения двигателя, об/мин
Mc – статический момент сопротивления механизма поворота, приведенный к валу двигателя, кгс·м
Статический момент сопротивления определяется по формуле:
![]() , кгс·м
, кгс·м
![]() , кгс·м
, кгс·м
где Q – суммарный вес поворотной платформы, т.е. вес всех вращающихся частей экскаватора, кгс
μ – коэффициент трения втулки катка по цапфе
rц – радиус цапфы катка, см
ρ – коэффициент трения качения катка, см
Rкат – средний радиус опорного круга, м
rк – радиус катка, см
iпер – передаточное число механизма поворота
ηпер – к.п.д. передачи механизма поворота.
Рд ≈ 3Рс = 3·20,2=60,6, кгс·м
![]() , кгс·м
, кгс·м
![]() , кгс·м
, кгс·м
Мощность сетевого двигателя определяется суммой мощностей работающих одновременно двигателей. Так как механизм подъема и механизм напора работают одновременно, то суммарная мощность составит ΣР= 159+45,2=214,2 кВт. Поэтому за расчетную мощность сетевого двигателя Ррасч = ΣР=214,2 кВт. Так как расчет мощности вспомогательных механизмов требует дополнительного механического расчета, то за расчетную мощность принимается мощности двигателей механизмов, устанавливаемых комплектно с экскаватором.
Похожие работы
... настольное оборудование 5143 5 820x700 Станок для намотки якорей ОПР – 3587 1 527x420 Стеллаж секционный для электрооборудования - - 2100x750 Станок точильный двусторонний 3325 1 N =1,7 кВт 700x480 9. Расчет площади производственных участков. Производственную площадь определяют исходя из числа постов, площадей занимаемых машинами, площади проходов и ...
... ограждена из-за возможности нанесения им вреда перемещаемыми грузами и разрушающимися конструкциями. Оценка эргономических характеристик условий труда крановщика при эксплуатации автомобильного крана Эргономические условия труда определяются совокупностью психофизиологических факторов, возникающих в процессе трудовой деятельности. Психофизиологические опасные и вредные производственные ...
... (кН) Противовес (кН) Башня (кН) Стрела (кН) Плечо удерживающих сил (весов элементов, расположенных слева от вертикальной оси опрокидывания) определяется как , где (9) башенный кран грузоподъемность механизм liид - расстояние от центра тяжести элемента до оси вращения крана; b - расстояние от оси вращения крана до ...



... ї машини й штовхача (у випадку застосування останнього) і скрепери із примусовим завантаженням скребковим елеватором, установленим на самому скрепері. У зв'язку із широким впровадженням гідравліки в будівельних і дорожніх машинах причіпні й самохідні скрепери випускають тільки з гідростатичним приводом робочих органів і механізмами примусового вивантаження ґрунту з ковша. Спосіб примусового ...
0 комментариев