Навигация
3 РАСЧЕТ РЕГУЛЯТОРА
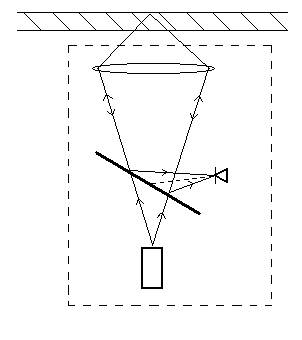
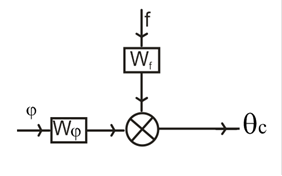
Первая проблема – это проблема качества и точности, а, следовательно, проблема выбора коэффициента усиления k. Коэффициент усиления выбирается, исходя из требований точности, которые определяются ограничением на установившуюся ошибку. Необходимо учитывать действие момента нагрузки. Для этого рассмотрим следующую упрощенную структурную схему нашей системы стабилизации угла.
|
|
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
 | |||
Рисунок 3.1 – Cтруктурная схема системы стабилизации угла
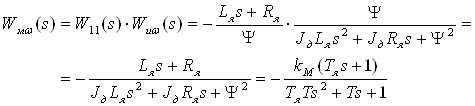
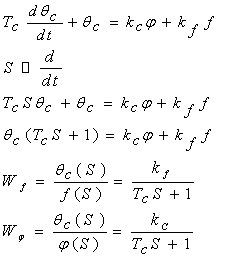
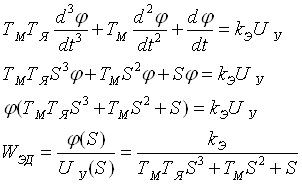
![]() , (3.1)
, (3.1)
где ![]() .
.
 (3.2)
(3.2)
Запишем выражение для ошибки:
![]()
Определим требуемую добротность системы ![]() . Найдём для этого
. Найдём для этого ![]() , при
, при ![]() . Так как
. Так как
![]() ,
, 
Если все корни ![]() , то при
, то при ![]()
![]() , где:
, где:
![]() .
.
Получаем:

Так как ![]() , то
, то
![]() =4+116,36∙10=1167.6
(3.3)
=4+116,36∙10=1167.6
(3.3)
Следовательно, добротность системы:
![]() (3.4)
(3.4)
Рассмотрим влияние Тя на качество системы.
Для простоты положим Тя = 0. Тогда структурная схема системы стабилизации угла (рисунок 3.2) будет иметь следующий вид:
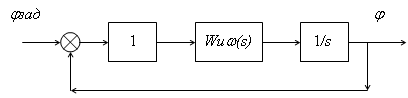
Рисунок 3.2 – Структурная схема системы стабилизации угла
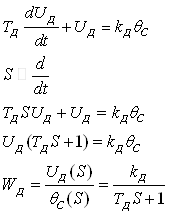
где ![]() . (3.5)
. (3.5)
Запишем ![]()
Следовательно, передаточная функция всей системы будет равна
![]() .
.
Проверим систему на устойчивость, воспользовавшись алгебраическим критерием Гурвица:
Q(s)=![]() ,
,
D1=a1=0,46>0,
D2=a1∙a2-a3∙a0=0,46∙![]() -1∙0>0,
-1∙0>0,
следовательно, система является устойчивой.
Приведем ПФ прямой цепи к каноническому виду:
![]() , (3.6)
, (3.6)
характеристическое уравнение ![]() , следовательно, корни будут
, следовательно, корни будут
![]() ,
,
где h=x/T=x∙wo,
иначе ![]() .
.
Так как h<wo, значит можно ввести обратную разность, которая будет положительной:
![]() - частота звена с учетом затухания (измененная). Следовательно
- частота звена с учетом затухания (измененная). Следовательно
![]()
Отсюда видно, что собственная частота колебательного звена w02=![]() , значит коэффициент усиления k=1.
, значит коэффициент усиления k=1.
h= 0,46/ 2 =0,23,
теперь найдем собственную частоту с учетом затухания w=101.
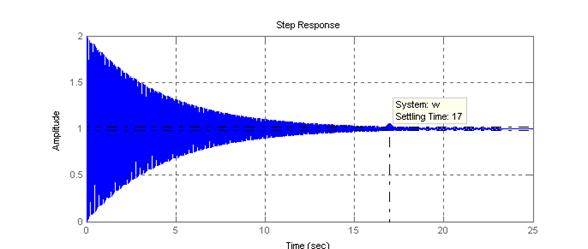 |
Найдем время регулирования
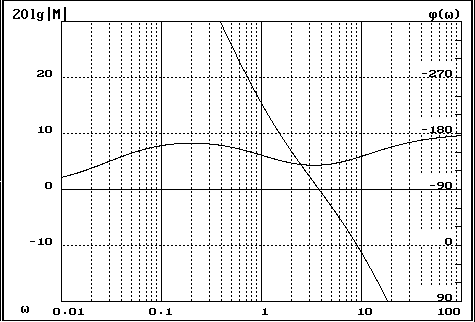
Рисунок 3.3 – Переходный процесс прямой цепи
tp = 17 c >>2 c, время регулирования не удовлетворяет условию tp < 2 (с).
Реакция системы на единичный скачок, осуществленная в MatLab, представлена на рисунке 3.3.
Из переходной характеристики видно, что система устойчива, но имеет плохие показатели точности и качества: время регулирования tp= 17 с, что значительно больше желаемого tp < 2с, а перерегулирование системы значительно превышает желаемое перерегулирование 15 % и равно 100 %. Из этого следует, что для улучшения показателей качества и точности система нуждается в коррекции.
2) Оценим влияние Тя ¹ 0
Исходя из параметров выбранного двигателя Lя= 10 мГн , Rя=2 Ом;
![]() (3.7)
(3.7)
Следовательно,
![]() (3.8)
(3.8)
Тогда ПФ будет равна:
 (3.9)
(3.9)
Определим устойчивость этой системы по критерию Гурвица. Для этого составляем определитель.
![]()
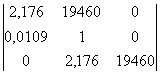
D1=2,176>0
D2=2,176-0,0109∙![]() = -209,9<0
= -209,9<0
Система неустойчива, так как значение определителя меньше нуля.
Из всего этого следует, что при полученных параметрах передаточной функции (коэффициенте усиления k и постоянной времени Т) система неустойчива. И, следовательно, для обеспечения устойчивости системы и хороших показателей ее качества и точности, в прямую цепь исследуемой системы необходимо ввести корректирующее звено.
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
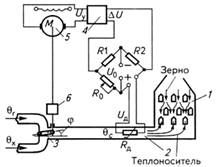
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев