Навигация
РАСЧЕТ КОРРЕКТИРУЮЩЕГО ЗВЕНА
24567
знаков
2
таблицы
15
изображений
4 РАСЧЕТ КОРРЕКТИРУЮЩЕГО ЗВЕНА
Так как исследуемая система является неустойчивой, необходимо ввести корректирующее звено в ее прямую цепь. Это позволит не только скорректировать систему, сделав ее устойчивой, но и обеспечить требуемые показатели качества и точности: время регулирования tp < 2c и перерегулирование s < 15%. Для получения передаточной функции корректирующего звена воспользуемся методом ЛАЧХ.
4.1 Получение характеристик желаемой ЛАЧХ
Предельная относительная ошибка воспроизведения полезного (гармонического) сигнала
![]() (4.1)
(4.1)
где ![]()
Характеризует интенсивность воздействия полезного сигнала, ![]() - предельная ошибка воспроизведения полезного сигнала
- предельная ошибка воспроизведения полезного сигнала
![]() (рад/с) - максимальная частота полезного сигнала.
(рад/с) - максимальная частота полезного сигнала.
Предельная относительная ошибка от помехи:
![]() (4.2)
(4.2)
Минимальная частота помехи
![]() .
.
4.2 Построение амплитудно-частотных характеристик
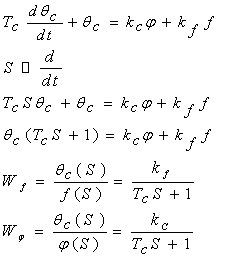
Передаточная функция разомкнутой системы имеет вид:
![]() (4.3)
(4.3)
![]() (4.4)
(4.4)
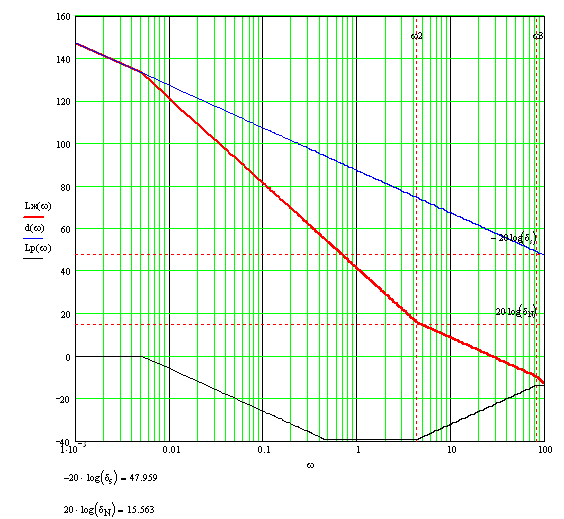
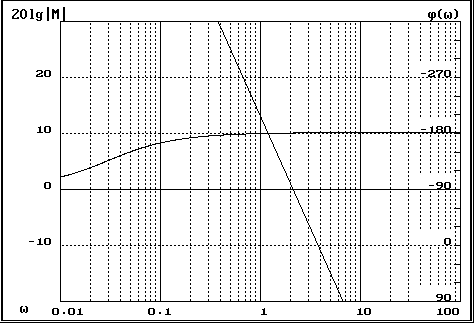
Амплитудно-частотная характеристика неизменяемой части представлена на рисунке 4.1.
Построение желаемой ЛАЧХ производится исходя из характеристик точности, полученных в пункте 4.1, и характеристик переходного процесса, содержащихся в техническом задании. Желаемую логарифмическую амплитудно-частотную характеристику разомкнутого контура строим, исходя из того, чтобы среднечастотная часть, проходящая через с, не пересекала запретную область полосы высокочастотных помех (20lgN, N).
Желаемая ЛАЧХ состоит из трех основных частей:
нижнечастотная часть: отвечает за точность
среднечастотная часть: отвечает за время регулирования, перерегулирование и запасы устойчивости
высокочастотная часть: строится исходя из удобства получения ЛАЧХ регулятора.
Построение желаемой ЛАЧХ начинается с построения среднечастотной асимптоты, имеющей частоты сопряжения ![]() и w3. Для обеспечения достаточного запаса по фазе необходимо чтобы
и w3. Для обеспечения достаточного запаса по фазе необходимо чтобы ![]()
Также необходимо выполнения условия![]() >2.
>2.
На основании предъявляемых требований к построению желаемой ЛАЧХ получим:
![]() ,
,
![]() ,
,
![]()
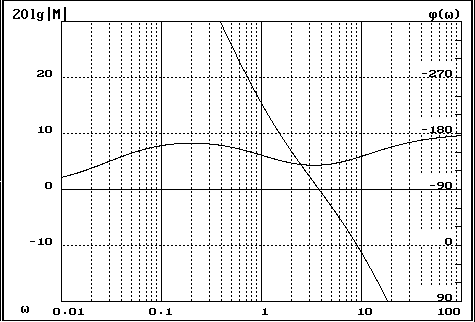
Желаемая логарифмическая амплитудно-частотная характеристика представлена на рисунке 4.1.
Рисунок 4.1 ЛАЧХ желаемой передаточной функции и регулятора
4.3 Нахождение передаточной функции регулятора
В соответствии с видом ЛАЧХ, приведённой на рисунке 4.1, желаемая передаточная функция прямой цепи имеет вид:
![]() (4.5)
(4.5)
Так как передаточная функция неизменной части имеет вид:
![]() (4.6)
(4.6)
то передаточная функция регулятора:
![]()
Так как ![]() , то передаточную функцию регулятора можно представить в виде форсирующего звена:
, то передаточную функцию регулятора можно представить в виде форсирующего звена:
![]() (4.7)
(4.7)
где  .
.
![]() (4.8)
(4.8)
![]()
Или ![]() , (4.9)
, (4.9)
![]() (4.10)
(4.10)
Логарифмическая амплитудно-частотная характеристика регулятора представлена на рисунке 4.1.
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
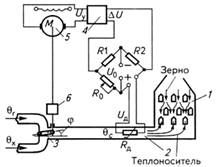
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев