Навигация
ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
24567
знаков
2
таблицы
15
изображений
1 ФУНКЦИОНАЛЬНАЯ И СТРУКТУРНАЯ СХЕМЫ СИСТЕМЫ
Первый этап проектирования состоит в выборе элементов этой системы и формировании функциональной схемы.
В курсовом проекте угол поворота вала ЭД должен измеряться с помощью датчика (Д) одного из следующих типов:
потенциометрические;
индукционные (сельсины, вращающиеся трансформаторы, следящие трансформаторы магнесины);
емкостные;
фотоэлектрические.
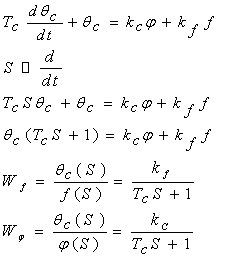
Назначение этих датчиков состоит в преобразовании угла поворота вала в электрическое напряжение U. Усилитель напряжения (УН) суммирует этот сигнал с заданным ![]() и формирует ошибку регулирования
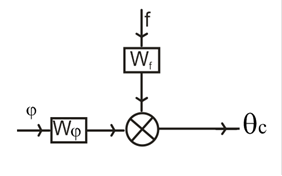
и формирует ошибку регулирования ![]() . Она усиливается по мощности с помощью усилителя УМ и подается на исполнительный двигатель. Соответствующая функциональная схема приведена на рисунке 1.1.
. Она усиливается по мощности с помощью усилителя УМ и подается на исполнительный двигатель. Соответствующая функциональная схема приведена на рисунке 1.1.
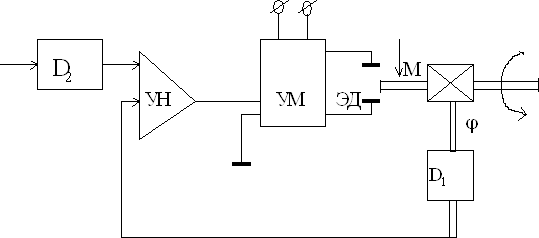
Рисунок 1.1 – Функциональная схема электродвигателя
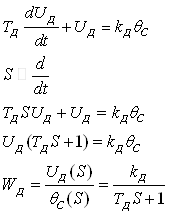
Электродвигатель как четырехполюсник характеризуется двумя входными параметрами: ![]() - напряжение в цепи якоря и
- напряжение в цепи якоря и ![]() - ток якоря и двумя выходными: М - момент вращения, W- угловая скорость вала. Эти характеристики связывают два уравнения четырехполюсника
- ток якоря и двумя выходными: М - момент вращения, W- угловая скорость вала. Эти характеристики связывают два уравнения четырехполюсника
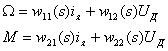 (1.1)
(1.1)
где частные передаточные функции имеют вид
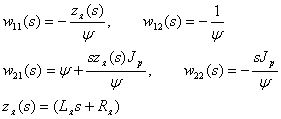 (1.2)
(1.2)
Уравнения (1.1), (1.2) следуют из дифференциальных уравнений двигателя
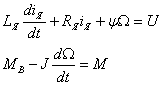 (1.3)
(1.3)
где
![]() - индуктивность и сопротивление якорной цепи,
- индуктивность и сопротивление якорной цепи,
![]() - ток якоря,
- ток якоря,
J - момент инерции якоря и всех жестко соединенных с ним частей,
![]() - электромагнитный вращающий момент двигателя,
- электромагнитный вращающий момент двигателя,
M - момент сопротивления нагрузки, приведенной к валу двигателя.
Из приведенных уравнений следует структурная схема системы стабилизации, изображенная на рисунке 1.2, где обозначено
Д1, Д2 – датчики;
Ку – коэффициент усиления;
j - угол поворота вала.
Wp(s) – передаточная функция регулятора;
Ne - высокочастотные шумы,
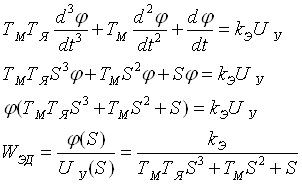
![]() (s) - передаточная функция двигателя по управлению от напряжения U до угловой скорости вращения якоря ,
(s) - передаточная функция двигателя по управлению от напряжения U до угловой скорости вращения якоря ,
![]() (s)- передаточная функция двигателя по возмущению от момента сопротивления на валу двигателя до угловой скорости вращения якоря .
(s)- передаточная функция двигателя по возмущению от момента сопротивления на валу двигателя до угловой скорости вращения якоря .
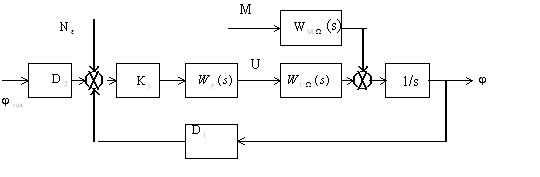
Рисунок 1.2 – Структурная схема системы стабилизации
 (1.4)
(1.4)
Параметры этих передаточных функций могут быть определены по характеристикам пускового момента ![]() скорости холостого хода -
скорости холостого хода - ![]() :
:
![]() (1.5)
(1.5)
Характеристики ![]() и
и ![]() приводятся в справочной литературе [1] или в технической документации.
приводятся в справочной литературе [1] или в технической документации.
Для обеспечения заданных максимальных значений скорости ![]() и ускорения движения нагрузки
и ускорения движения нагрузки ![]() двигатель на валу должен развивать скорость
двигатель на валу должен развивать скорость ![]() и момент
и момент ![]() , определяемые выражениями [2], [3], [4]
, определяемые выражениями [2], [3], [4]
![]() (1.6)
(1.6)
![]() , (1.7)
, (1.7)
где ![]() и
и ![]() - моменты инерции двигателя и редуктора;
- моменты инерции двигателя и редуктора;
![]() - момент инерции нагрузки;
- момент инерции нагрузки;
![]() -максимальный момент сопротивления нагрузки;
-максимальный момент сопротивления нагрузки;
![]() - передаточное число редуктора;
- передаточное число редуктора;
![]() - коэффициент полезного действия редуктора.
- коэффициент полезного действия редуктора.
Похожие работы
... управления, одна из которых действует в вертикальном, а другая в горизонтальном, по отношении к диску, направлениях. Называются они соответственно системой автоматического регулирования фокусировки (САРФ) и системой автоматического регулирования радиального положения пятна относительно дорожки записи (САРД). В видео дисковых системах дополнительно используется система управления в тангенциальном ...
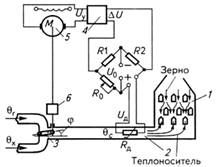
... и расширение знаний по теории автоматического управления, развитию навыков и применение современных инженерных навыков, в том числе и с применением ЭВМ при разработке и изучению реальных САУ. Система автоматического регулирование температуры теплоносителя зерносушилки На рис. 3 показана схема САР температуры теплоносителя, поступающего в шахтную зерносушилку 1 из камеры смешивания 2, которая ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
... проведение погрузочно-разгрузочных работ и расширить возможности модульной комплектации ТС для транспортировки крупногабаритных грузов. Создание системы стабилизации ПКП является актуальной задачей. 2.1. Постановка задачи Требуется разработать систему автоматической стабилизации пневмоколесной платформы для перевозки крупногабаритных грузов. Система должна обеспечивать горизонтальное ...
0 комментариев