Работа аппарата в режиме УИВЛ
Расчетно-конструкторская часть
Рассчитаем вероятность безотказной работы за время средней интенсивности эксплуатации
Обмоточный коэффициент обмотки статора
Площадь, занимаемая пазовой изоляцией
Токи стержня и короткозамыкающих колец ротора
Магнитодвижущая сила для зубцов статора
Среднее превышение температуры обмотки статора над окружающей средой
Методика испытания устройства для испытания
Экономическая часть
Навигация
Рассчитаем вероятность безотказной работы за время средней интенсивности эксплуатации
Модернизация блока управления аппарата искусственной вентиляции легких "Спирон–201"
145504
знака
14
таблиц
14
изображений
2. Рассчитаем вероятность безотказной работы за время средней интенсивности эксплуатации.
Pc(8) = 1 – (1-е-0,000005·8)2 = 0,99999999
Рд(8) = 0,99999999
Р(8) = е-Λ·8 = 0,999, где Λ = ∑λi = 16,4· 10-6
Робщ(8) = 0,99999999·0,99999999·0,999 = 0,9989
Доза отказа ИЭТ существенно зависит от интенсивности излучения ИИ, а ресурс изделий в радиационных полях в 2 –5 раз ниже показателей приводимых в ТУ на ИЭТ. [2]. При этом интенсивность отказов увеличивается в 2 – 5 раз, т.е.
Λ= 0,000049;
λс = 0,000015;
λд = 0,00002.
Получим
Рси(8) = 0,9999999;
Рди(8) = 0,9999999;
Ри(8) = 0,999;
Робщ(8) = 0,99899.
Рси(2000) = 0,999;
Рди(2000) = 0,998;
Ри(2000) = 0,906;
Робщ(2000) = 0,904.
Следовательно, в условиях действия ИИ от дефибриллятора и рентгеновского аппарата, вероятность безотказной работы по ГОСТу Р50444–92 не достаточна.
Для повышения надежности микроконтроллера необходимо:
1. Для эффективного уменьшения воздействий электромагнитных излучений рекомендуется экранирование микроконтроллера.
2. Заменить некоторые элементы на зарубежные аналоги:
КР580ВИ53 – времязадающее устройство на I8253;
К580ВК28 – комбинированное устройство на I8228;
К580ВМ80А – микропроцессор на I8080;
КР580ВВ51А – устройство управления вводом – выводом на I8251;
К1816ВЕ35 – микро – ЭВМ на I8025;
К555АП3 – формирователь разрядных токов на I4240;
КР580ВВ55А – I8255A;
К555ИД7 – SN74LS138N;
КР580ВН59 – I8259;
К555ЛЕ1 – SN74LS02N;
КР537РУ8А – HM6516;
КР580ВА87 – I8257;
К555ИР22 – SN74LS373N;
К580ВР43 – I8243.
Расчет интенсивности отказов зарубежных микропроцессоров производится по справочнику [6].
λ = (С1· πт + С2· πЕ)·πQ·πL·10-6 1/час,
где С1 – коэффициент, учитывающий количество элементов в кристалле микросхемы,
С2 – коэффициент, учитывающий количество ножек микросхемы, коэффициент, учитывающий
πт – коэффициент, учитывающий рабочую температуру микросхемы,
πЕ – коэффициент, учитывающий условия эксплуатации элемента (в данном случае на земле),
πQ – коэффициент, учитывающий качество изготовления,
πL – коэффициент, учитывающий время выращивания кристалла.
λ = (0,08·0,03+0,015·0,4)·0,9·1·10-6 = 0,0076·10-6
Заменив, отечественные микросхемы на их зарубежные аналоги, рассчитаем вероятность безотказной работы микроконтроллера.
Рз (8) = е-Λ·8 = 0,9998,
Рзобщ(8) = 0,99999999·0,99999999·0,9998 = 0,9998
Рз(2000) = е-Λ·2000 = 0,989, где Λз = 14,36
Робщ(2000) = 0,9999·0,9998·0,989 = 0,989
Такая вероятность безотказной работы соответствует ГОСТу Р50444–92 для изделий класса А.
2.2 Расчет экрана блока управленияДля повышения надежности необходимо экранировать блок печатных плат, находящихся в блоке управления, от внешних источников помех.
Экран представляет собой металлический параллелепипед, разделяющий две области пространства, и предназначен для регулирования распространения электромагнитных полей от одной из этих областей к другой.
Степень экранирования оценивается величиной коэффициента экранирования
К Э=![]() ,
,
где Нн – напряженность наружного поля;
Нв – напряженность того же поля внутри экрана.
Предельно допустимый уровень воздействия магнитного поля для человека при длительном воздействии равен Нв=0,8 А/м. (Инструкция главного Государственного санитарного врача от 16.8.1977 №1742). Уровень магнитного поля от медицинской установки УМ-8 составляет 40А/м
КЭ=![]()
Коэффициент экранирования материала рассчитывается по формуле [7,9]
КЭ= ., (2.2.1)
., (2.2.1)
где m – магнитная проницаемость материала;
Rв – среднее арифметическое внутренних размеров экрана по трем его главным осям;
Rн – среднее арифметическое наружных размеров экрана.
Толщина экрана
D=Rн-Rв (2.2.2)
Выведем формулу для расчета Rн
 , (2.2.3)
, (2.2.3)
Rв=![]() мм
мм
Для экранирования электромагнитных полей используют материалы с высокой магнитной проницаемостью. В качестве такого материала подходит пермаллой [8].
Для пермаллоя марки 79 НМ m=20×103
Rн= =228 мм
=228 мм
D=228–227,7=0,3 мм
Вывод: блок плат, находящихся в блоке управления необходимо экранировать пермоллоем марки 79НМ толщиной 0,3 мм. На чертеже КФБН941400.731 СБ представлен экран с размерами и полученной толщиной. Экран понижает интенсивность отказов элементов печатных плат в 2 – 3 раза, в результате чего повышается надежность блока управления, а так же и всего аппарата.
2.3 Расчет основных параметров следящей системыРассчитаем момент инерции всей системы. Он равен суммарному моменту ее составляющих.
J=Jпр +Jдв. +Jтг, (2.3.1)
где Jпр – момент инерции системы,
Jдв – момент инерции двигателя,
Jтг – момент инерции тахогенератора.
Jдв=1,2×10-4кг×м2,
Jтг=0,5×10-4кг×м2 [11].
На валу расположены цилиндрические кулачки с радиусом 0,02 м и длиной 0,01 м. Момент инерции одного кулачка равен
![]() , (2.3.2)
, (2.3.2)
где m – масса кулачка,
R – радиус кулачка.
![]() , (2.3.3)
, (2.3.3)
где Р=7,7×103 кг/м3,
V=p×R2×L=3,14×0,004×0,01=1,256×10-5 м3.
![]() кг.
кг.
![]() кг×м2
кг×м2
Так как на валу стоит три кулачка, то Jпр=5,7×10-6кг×м2.
Момент инерции всей системы
J= 1,2×10-4+0,5×10-4+0,057×10-4=1,757×10-4 кг×м2
Рассчитаем коэффициент вязкого трения двигателя
F= , (2.3.4)
, (2.3.4)
где kм= 7,19 – коэффициент характеризующий магнитную проводимость магнитопровода электродвигателя,
kе=1,2 – коэффициент прпорциональности характеризующий конструкцию электродвигателя,
Ф=6×10-4 Вб,
Rа=180 Ом – сопротивление ротора.
![]() .
.
Рассчитаем коэффициент успокоения, вносимого тахогенератором
![]() , (2.3.5)
, (2.3.5)
где km – передаточный коэффициент тахогенератора,
kу =20 – коэффициент усиления усилителя по напряжению,
kdU – коэффициент пропорциональности между пусковым моментом двигателя и приложенным к его якорю напряжением.
![]() , (2.3.6)
, (2.3.6)
![]() , (2.3.7)
, (2.3.7)
где W= 141,4 – скорость вращения тахогенератора,
Uвых =11В – выходное напряжение тахогенератора,
Мп – пусковой момент двигателя.
![]() , (2.3.8)
, (2.3.8)
![]()
где Мном – номинальный момент двигателя.
![]() , (2.3.9)
, (2.3.9)
где Р=50В=510 кг×см/сек
![]() кг×см,
кг×см,
![]() кг×см.
кг×см.
![]() ,
,
![]()
Получим
![]() .
.
Рассчитаем передаточный коэффициент ситемы
![]() (2.3.10)
(2.3.10)
где kп=0,08 В/рад – коэффициент показывающий, какое напряжение сигнала ошибки приходится на единицу угла рассогласования.
![]()
В данном разделе проводится моделирование следящей системы, дифференциальное уравнение движение которой было получено в пункте (1.4) и имеет вид
![]()
Рассмотрим, как ведет себя следящая система в переходном процессе. Для этого следует задаться определенным законом движения входного вала системы.
Пусть до момента t=0 система находится в покое и ее выходной вал неподвижен. В
момент t=0 входной вал начинает вращаться с постоянной скоростью.
Для этих условий уравнение движения следящей системы примет вид:
![]() (2.4.1)
(2.4.1)
для следящих систем в переходных процессах можно пренебречь влиянием статического момента нагрузки Мст по сравнению с динамическим моментом Мдин. Это значительно облегчает анализ системы, так как упрщается ее дифференциальное уравнение.
Итак, пренебрегая статическим моментом нагрузки, получим
![]() (2.4.2)
(2.4.2)
Передаточная функция будет иметь вид
![]() (2.4.3)
(2.4.3)
![]()
График переходного процесса представлен на рисунке (2.4.1.)
Время переходного процесса tп.п.= 0,12 сек
Перерегулирование s=![]() 42,87%.
42,87%.
Для сравнения приведем график переходного процесса для системы без тахогенератора.
Передаточная функция в этом случае будет иметь вид
![]() (2.4.4)
(2.4.4)
![]()
График переходного процесса представлен на рисунке (2.4.2)
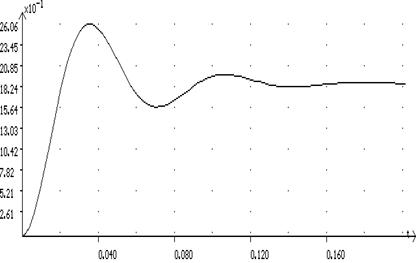
Рисунок 2.4.1 График переходного процесса следящей системы
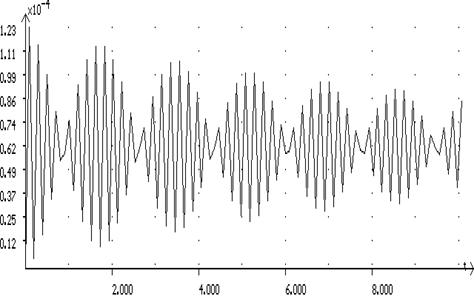
Рисунок 2.4.2 График переходного процесса системы без тахогенератора
Переходный процесс для двигателя получился колебательный, поэтому на выходе воздуходувки воздух выходит не равномерно. Для того, чтобы сгладить неравномерность в АИВЛ «Спирон-210» перед и после воздуходувки были установлены ресиверы. После того как установили тахогенератор, колебания уменьшились и на много раньше установился установившийся режим.
2.5 Расчет основных параметров электродвигателяТип двигателя АВЕ-052–4
Технические данные: [11]
Полезная мощность на валу P2=50 Вт
Скорость вращения ротора n =1350 об/мин.
Частота сети f=50 Гц
Напряжение питательной сети U1=220 В
Напряжение на зажимах управляющей обмотки U3=220 В
Число фаз статора m1=2
Момент инерции ротора 1,2 кг×см2
Кратность пускового момента mp=0,5
Электоромеханическая постоянная времени ТМ=0,2 сек
Cos φ = 0,95
КПД = 50%.
Весь расчет ведется по справочникам [10, 11].
Основные размеры двигателя
1. Расчетная мощность:
![]() Вт. (2.5.1.)
Вт. (2.5.1.)
где ξ=0,8÷0,94
2. Машинная постоянная:
![]() (2.5.2.)
(2.5.2.)
где: Kω=0,86÷0,96 – обмоточный коэффициент
α=0,64
Bδ=0,25÷0,6 Тл – амплитуда индукции в воздушном зазоре
AS=60÷240 А/см – линейная нагрузка статора.
3. Диаметр расточки и расчетная длина пакета статора
 мм (2.5.3.)
мм (2.5.3.)
l0=ξ·Da=36,5 мм. (2.5.4.)
По ГОСТ 6636–60 Da=42 мм; l0=36 мм.
Материал – листовая электротехническая сталь марки Э12, толщиной 0,5 мм. (ГОСТ 802–58).
4. Полюсной шаг
![]() мм (2.5.5.)
мм (2.5.5.)
где 2p=4
Обмотки статора
5. Тип обмотки. Принимаем двухслойную обмотку с целым числом пазов, приходящихся на один полюс и фазу и сокращенным шагом.
6. Число пазов статора
![]() (2.5.6.)
(2.5.6.)
где q1=2 – число пазов, приходящихся на полюс и фазу
7. Шаг обмотки статора по пазам
![]() – полюсной шаг по пазам (2.5.7.)
– полюсной шаг по пазам (2.5.7.)
![]() (2.5.8.)
(2.5.8.)
где λ=0,8÷0,85
0 комментариев