Навигация
Одновісний гіроскопічний стабілізатор
10512
знаков
5
таблиц
21
изображение
Міністерство освіти та науки України
Житомирський державний технологічний університет
Кафедра АіКТ
Група
Теорія автоматичного керування
Курсова робота на тему:
”ОДНОВІСНИЙ ГІРОСКОПІЧНИЙ СТАБІЛІЗАТОР”
2 вар. 7схема
Виконав:
Перевірив: Свістельник С.С.
Житомир-2005
Зміст
Зміст
1.Технічне завдання
2. Опис роботи системи
3. Аналіз і синтез лінійної САК
3.1. Структурна схема САК
3.2. Передаточні функції САК
3.3. Визначення стійкості системи
3.4. Логарифмічно-частотні характеристики
3.5. Корекція системи
3.6. Корегувальний пристрій
3.7. Перехідна характеристика
3.8. Похибка системи
3.9. Моделювання
4. Аналіз дискретної САК
4.1 Визначення періоду дискретизації
4.2. Передаточні функції
4.3. Логарифмічні псевдочастотні характеристики
4.4. Перехідна характеристика
4.5. Похибка системи
5. Висновки по роботі
6. Використана література
1.Технічне завдання
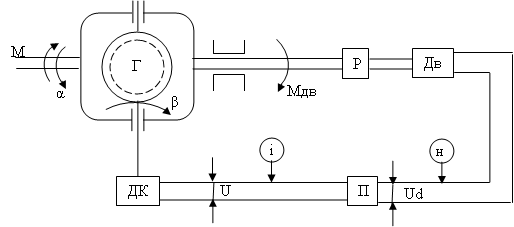
Рис.1.1
Рівняння елементів системи:
Гіроскоп: ![]() ;
;
Датчик кута: ![]() ;
;
Підсилювач: ![]()
Двигун і редуктор: ![]() .
.
Табл.1.1
| Кг | Кдк | Кп | Кдв | Тп | Тдв | М | а |
| 0,015 | 0,6 | 20 | 40 | 0,018 | 0,25 | 200 | 27 |
2. Опис роботи системи
Одновісний гіроскопічний стабілізатор призначений для стабілізування кута повороту в приладах, що рухаються.
Принцип дії цих приладів наступний:
Коли обурюючий момент не співпадає з моментом двигуна, в гіроскопі утворюється кут прецесії, який в датчику кута перетворюється в електричну величину. Вона далі підсилюється в підсилювачі і починає керувати двигуном. Причому в залежності від полярності даної величини двигун починає обертатися у відповідну сторону і через редуктор впливає на гіроскоп. Коли обурюючий момент співпадає з моментом двигуна, кут прецесії дорівнює нулю, а отже, дорівнює нулю і сигнал датчика кута.
3. Аналіз і синтез лінійної САК
3.1. Структурна схема САК

Рис.3.1.1
На схемі показані передатні функції таких елементів системи:
Гіроскоп ![]() ;
;
Датчик кута ![]() ;
;
Підсилювач ![]() ;
;
Двигун з редуктором ![]() .
.
Похожие работы
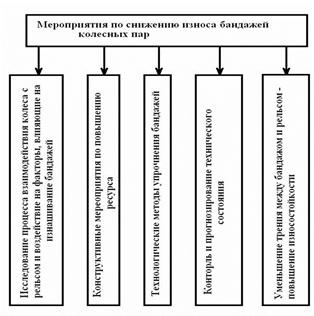
... Підйом в 4% для звичайного локомотива практично неможливий, але з ним легко справляється локомотив, оснащений колесом з механізмом зубчатого зачеплення з кремальерою шляху. Розділ 2.Обгрунтування та вибір математичної моделі руху поїзда 2.1 Дефекти осей колісних пар Дефекти, що виникають в осях колісних пар протягом терміну їх служби, можуть бути класифіковані по двох групах. Дефекти ...
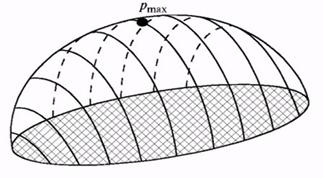
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
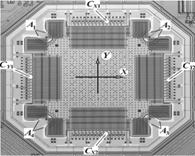
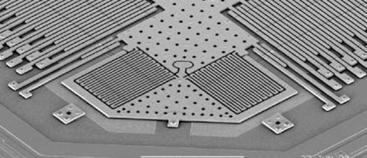
... підключенні з малим падінням напруги на pn –переході між виводом ST і шиною живлення Vs. Висновки В ході виконання курсової роботи були розглянуті питання про застосування мікромеханічних акселерометрів на рухомому об’єкті, автомобілі. Представлені кінематичні схеми, блок схеми акселерометрів різних видів, схеми чутливих елементів, ресорних підвісів, розглянуто принцип дії акселерометрів, ...
... . Варять не більше 20 хв. М'ясний порошок — однорідна маса, отримана подрібненням сухого м'яса, колір світло-коричневий. Варять не більше 5 хв. Волога в порошку не більше 10%, упаковка герметична. ЛЕКЦІЯ ПО ТОВАРОЗНАВСТВУ РИБИ 1.Характеристика сімейств риб Промислові риби класифікують по декількох ознаках. По способу і місцю життя риби ділять на морських, прісноводих, напівпрохідні і прох ...
0 комментариев