Навигация
4.2. Передаточні функції
Досліджуємо систему, що зображена на рис.4.2.1.

Рис.4.2.1
Визначимо дискретну передаточну функцію розімкненої та замкнутої ДСАК відносно вхідної дії:
![]()
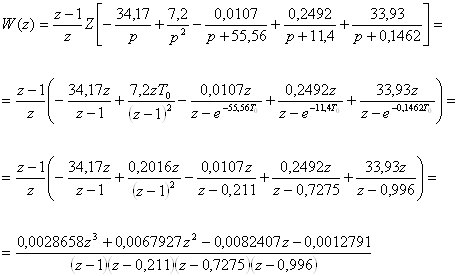
Визначимо передаточну функцію неперервної частини системи:

Для того, щоб обчислити цей вираз, необхідно розкласти вираз в квадратних дужках на елементарні дроби.
![]()
![]()
Записуючи систему рівнянь за методом невідомих коефіцієнтів і розв’язуючи її, отримаємо:
![]() .
.
Тоді:
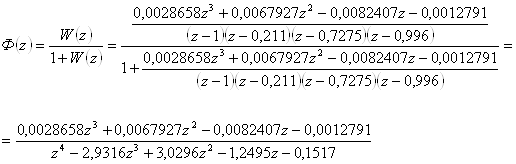
Передаточна функція замкнутої системи:
4.3. Логарифмічні псевдочастотні характеристики
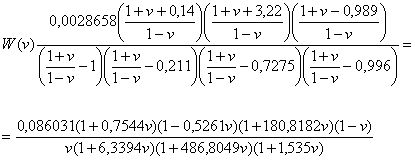
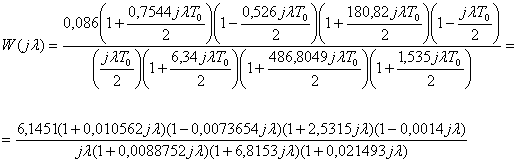
Для побудови псевдочастотних характеристик зробимо заміну.
![]()
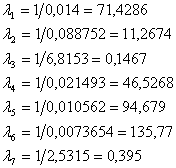
Для цього розкладемо чисельник на корені:
![]()
![]()
Контрольна точка ![]()
Табл.4.3.1
|
| 0,01 | 0,02 | 0,05 | 0,1 | 0,2 | 0,5 | 1 | 2 | 5 | 10 | 20 | 50 | 100 | 200 | 300 | 500 |
|
| -92 | -95 | -101 | -110 | -118 | -115 | -110 | -110 | -125 | -151 | -186 | -242 | -283 | -315 | -340 | -350 |
Будуємо логарифмічні псевдочастотні характеристики і за нею визначаємо, що система є стійкою (рис.4.3.1).
Система має такі запаси стійкості:
по амплітуді ![]() ;
;
по фазі ![]() .
.
4.4. Перехідна характеристика
Розрахуємо перехідну характеристику ДСАК.
![]()
![]() - перетворення від одиничної функції буде мати вигляд
- перетворення від одиничної функції буде мати вигляд ![]() ,
,
Тоді 
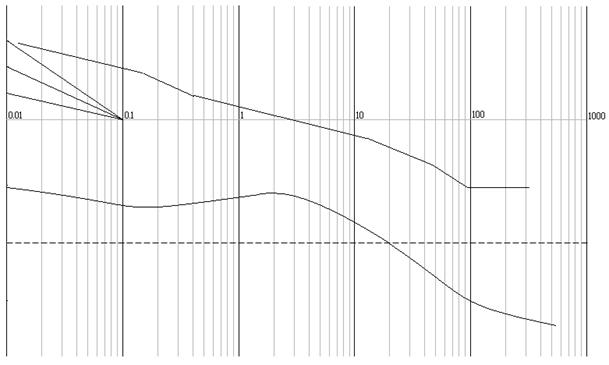
Рис.4.3.1
Запишемо систему рівнянь за методом невідомих коефіцієнтів:
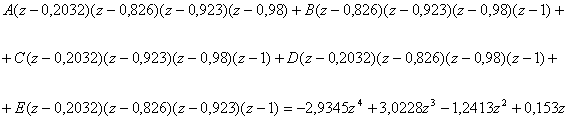
Підставимо у цей вираз значення
![]()
![]()
![]()
![]()
![]() .
.

Тоді ![]() або
або
![]()
Зробивши зворотне ![]() - перетворення
- перетворення
![]()
Перехідна характеристика зображена на рис.4.4.1.
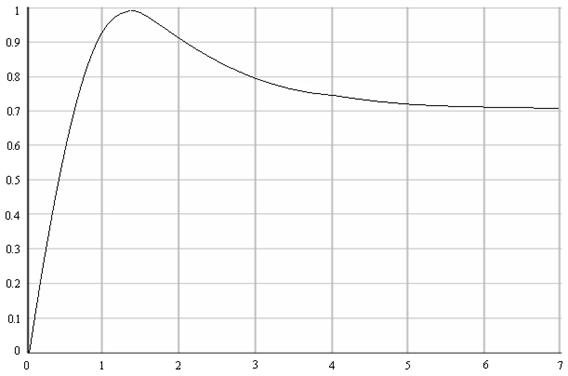
Рис.4.4.1
4.5. Похибка системи
![]()
Для заданого типу вхідної дії розрахуємо характеристику усталеної похибки. Для цього знайдемо передаточну функцію відносно похибки:
![]()
Для знаходження ![]() та
та ![]() знайдемо зображення передаточної функції дискретної САК відносно похибки за задавальною дією.
знайдемо зображення передаточної функції дискретної САК відносно похибки за задавальною дією.


Функція усталеної похибки приймає вигляд
![]()
Побудуємо графік усталеної помилки (рис. 4.5.1).
Розрахую два перших коефіцієнти помилок за допомогою MathCad:
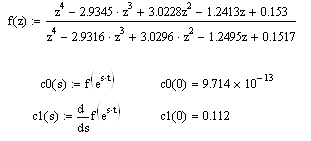
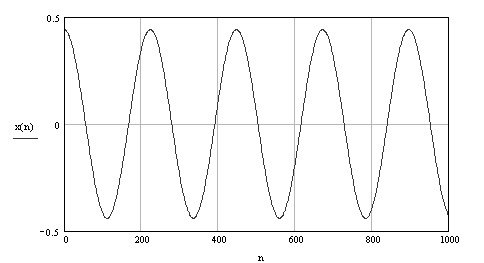
Рис.4.5.1
5. Висновки по роботі
В курсовій роботі досліджено курсовій роботі досліджено лінійну неперервну САК, виявлено, що її стійкість не задовольняє поставленим умовам. Для забезпечення стійкості системи синтезовано корегуючий пристрій. На базі неперервної САК синтезовано дискретну систему, де в якості імпульсного елемента взято екстраполятор нульового порядку. Обидва типи систем досліджені на стійкість, для обох систем визначений вираз для похибки при дії вхідного синусоїдального сигналу, побудовані перехідні характеристики і визначені показники якості. Аналізуючи обидві системи, можна сказати, що збільшилась швидкодія дискретної системи за рахунок якості перехідного процесу.
6. Використана література
1. Зайцев Г. Ф. Теория автоматического управления и регулирования. - К, 1988.
2. Зайцев Г. Ф., Костюк В. Й. IX Й. Чипаев. Основы автоматического управления и регулирования. -К, 1975.
3. Иващенко Н. Н. Автоматическое регулирование. - М, 1973.
4. Куропаткин П. В. Теория автоматического управлення. - М, 1978.
5. Самотокін Б. Б. Лекції з теорії автоматичного керування. - Ж., 2001.
6. Теория автоматического управления. Под ред. Нетушил А. В. - М, 1976.
7. Теория автоматического управления. Под ред. Воронова А. А., М, 1978.
8. Топчеев Ю. Й. Атлас для проектирования систем автоматического регулирования. - М, 1989.
9. Шамриков Б. М. Основы теории цифровых систем автоматического управления. - М,1983.
10. Иванов В. А., Ющенко А. С. Теория дискретных систем автоматического управления. -М, 1983.
11. Довідкова система MathCAD Professional 2000.
Похожие работы
... Підйом в 4% для звичайного локомотива практично неможливий, але з ним легко справляється локомотив, оснащений колесом з механізмом зубчатого зачеплення з кремальерою шляху. Розділ 2.Обгрунтування та вибір математичної моделі руху поїзда 2.1 Дефекти осей колісних пар Дефекти, що виникають в осях колісних пар протягом терміну їх служби, можуть бути класифіковані по двох групах. Дефекти ...
... ї стабілізації різних рухомих об'єктів, в заспокоювача хитавиці корабля, для стабілізації літального апарату та інших, а також для визначення викривлення бурових свердловин, шахт і т.д. 3 Гіроскопи в науці В даний час деякі моделі мобільних телефонів та ігрових контролерів обладнуються датчиками прискорення, так званими акселерометра. Такі датчики дозволяють управляти цими пристроями, зді ...
... підключенні з малим падінням напруги на pn –переході між виводом ST і шиною живлення Vs. Висновки В ході виконання курсової роботи були розглянуті питання про застосування мікромеханічних акселерометрів на рухомому об’єкті, автомобілі. Представлені кінематичні схеми, блок схеми акселерометрів різних видів, схеми чутливих елементів, ресорних підвісів, розглянуто принцип дії акселерометрів, ...
... . Варять не більше 20 хв. М'ясний порошок — однорідна маса, отримана подрібненням сухого м'яса, колір світло-коричневий. Варять не більше 5 хв. Волога в порошку не більше 10%, упаковка герметична. ЛЕКЦІЯ ПО ТОВАРОЗНАВСТВУ РИБИ 1.Характеристика сімейств риб Промислові риби класифікують по декількох ознаках. По способу і місцю життя риби ділять на морських, прісноводих, напівпрохідні і прох ...
0 комментариев