Навигация
Разработка системы управления двигателя постоянного тока
11651
знак
1
таблица
29
изображений
Содержание
Введение…………………………….…………………………………..................2
1. Определение параметров и структуры объекта управления.….…………….3
2. Разработка алгоритма управления и расчёт параметров устройств управления……………………………………………………………………...…7
3. Моделирование процессов управления, определение и оценка показателей качества…………………………………………………………………………..16
4. Разработка принципиальной электрической схемы и выбор её элементов.23
Список литературы.………………………………………….………………..…39
Введение
На современном этапе, характеризующемся приоритетным развитием машиностроения и автоматизации производства, автоматизированный электропривод сформировался как самостоятельное научное направление, в значительной степени определяющее прогресс в области техники и технологии, связанных с механическим движением, получаемым путем преобразования электрической энергии. Этим объясняется большой интерес специалистов к новым разработкам в данной отрасли техники и к ее научным проблемам.
Четко определился объект научного направления – система, отвечающая за управляемое электромеханическое преобразование энергии и включающая два взаимодействующих канала – силовой, состоящий из участка электрической сети, электрического, электромеханического, механического преобразователей, технологического рабочего органа, и информационный канал. В рамках данного курсового проекта рассматривается разработка информационного канала.
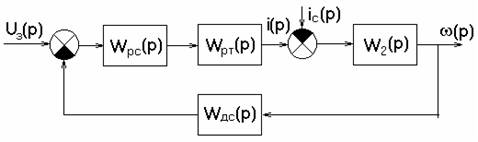
1. Определение параметров и структуры объекта управления
В состав объекта управления входит двигатель постоянного тока независимого возбуждения ![]() с параметрами по табл. 10.11 [1, стр. 277]:
с параметрами по табл. 10.11 [1, стр. 277]:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Данный ЭД предназначен для работы в широкорегулируемых электроприводах, соответствует ![]() , имеет защищенное исполнение, с независимой вентиляцией (асинхронный двигатель
, имеет защищенное исполнение, с независимой вентиляцией (асинхронный двигатель ![]() ).
).
Номинальная угловая скорость вращения
![]()
Максимальная угловая скорость вращения:
![]()
Номинальный ток якоря:
![]()
Суммарное сопротивление якорной цепи:
![]()
Произведение постоянной машины на номинальный поток:
![]()
Постоянная времени якорной цепи:
![]()
Номинальный момент:
![]()
Номинальный ток обмотки возбуждения:
![]()
Исходя из высоты оси вращения ![]() по табл. 1 [2, стр. 5]:
по табл. 1 [2, стр. 5]: ![]()
По рис. 4 [2, стр. 10]: ![]()
![]()
По рис. 2б [2, стр. 8]: ![]()
По табл. 2 [2, стр. 9] для класса изоляции ![]() :
: ![]()
По табл. 3 [2, стр. 10] для ![]() :
:
![]()
Окончательно получим:
![]()
По рис. 3 [2, стр. 9]: ![]()
Полюсное деление равно:
![]()
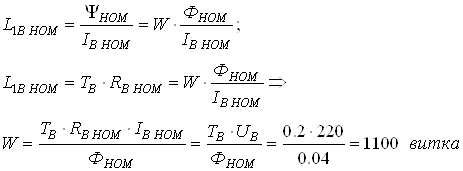
Число витков обмотки возбуждения [2, стр. 27]: ![]()
Номинальный магнитный поток:
![]()
Постоянная машины:
![]()
Коэффициент рассеяния [3, стр. 38]: ![]()
Индуктивность обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Постоянная времени обмотки возбуждения:
![]()
Суммарный момент инерции механизма:
![]()
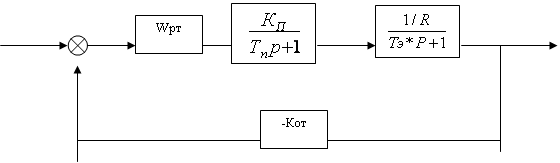
Так же объёкт управления содержит ![]() возбуждения и
возбуждения и ![]() напряжения якоря, частота коммутации которых:
напряжения якоря, частота коммутации которых: ![]()
Постоянная времени преобразователей равна:
![]()
Так как ![]() и
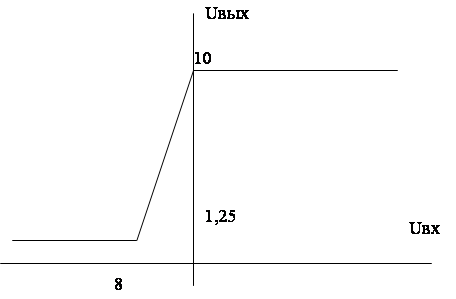
и ![]() представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (
представим преобразователи в виде пропорциональных звеньев, откуда с учетом диапазона стандартных управляющих сигналов (![]() ) имеем и максимальной скважности
) имеем и максимальной скважности ![]() (
(![]() ) получим:
) получим:
![]()
Похожие работы

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
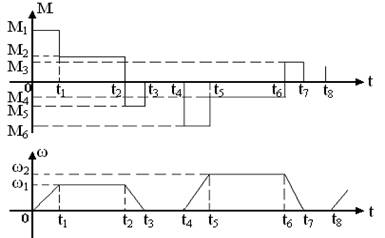
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
... При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит в общий блок системы управления, т.е. является отдельным её модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъём с ответной частью. Для удобства монтажа на передней панели ...
0 комментариев