Навигация
Разработка алгоритма управления и расчёт параметров устройств управления
11651
знак
1
таблица
29
изображений
2. Разработка алгоритма управления и расчёт параметров устройств управления
Объект управления описывается следующими уравнениями [3, стр.38-39]:
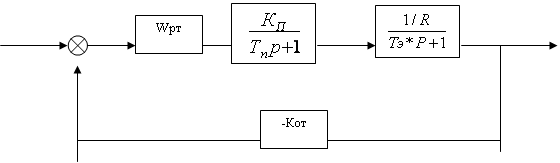
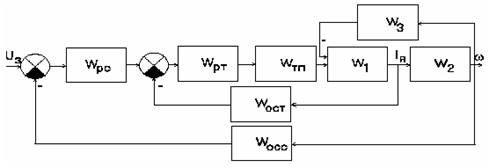
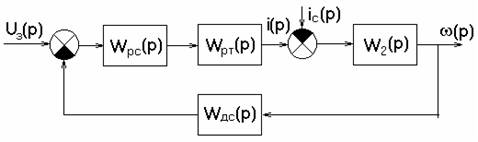
Выберем двухконтурную систему управления скорости с внутренним контуром потока (рис. 1).
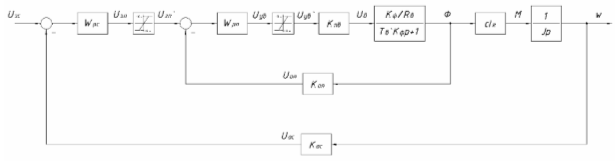
Рис. 1. Двухконтурная система регулирования скорости.
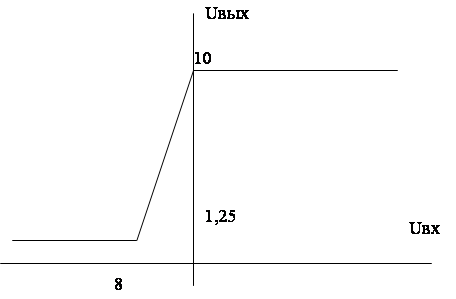
Универсальная кривая намагничивания представлена на рис. 3.
Так как регулирование происходит изменением потока, минимальный поток будет при максимальной скорости:
![]()
Минимальный ток возбуждения (по рис. 3):
![]()
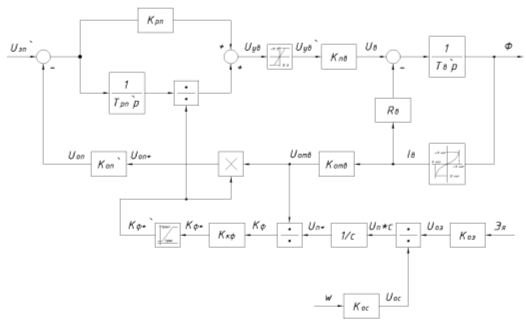
Рис. 3. Универсальная кривая намагничивания.
При этом коэффициент линеаризации кривой намагничивания лежит в диапазоне:
![]()
![]()
Максимальная постоянная времени потока:
![]()
Коэффициент форсирования тока возбуждения [4, стр. 559]:
![]()
Малая постоянная времени:
![]()
Желаемая передаточная функция замкнутого контура потока:
![]()
Желаемая передаточная функция разомкнутого контура потока:
![]()
Передаточная функция разомкнутого контура потока:
![]()
Коэффициент обратной связи по потоку:
![]()
Передаточная функция регулятора потока:
![]()
где
![]()
![]()
Коэффициент ![]() подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
подлежит определению непрерывно, для чего контур потока будет модифицирован (рис. 4.).
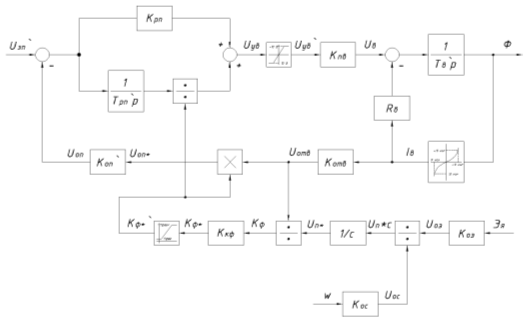
Рис. 4. Модифицированный контур регулирования потока.
Коэффициент обратной связи по скорости:
![]()
Коэффициент обратной связи ЭДС:
![]()
Коэффициент обратной связи по току возбуждения:
![]()
Коэффициент нормализации ![]()
![]()
С учётом этого:
![]()
![]()
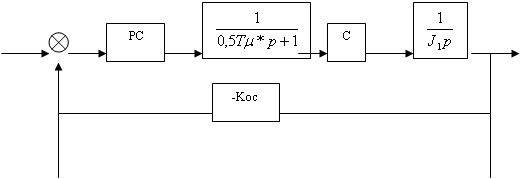
Внешний контур скорости представлен на рис. 5.
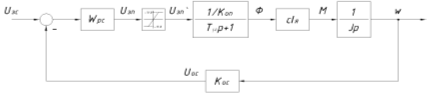
Рис. 5. Контур регулирования скорости.
Желаемая передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция разомкнутого контура скорости:
![]()
Передаточная функция регулятора скорости
![]()
где
![]()
Так как нагрузка с постоянной мощностью изменяет знак ![]() и коэффициент
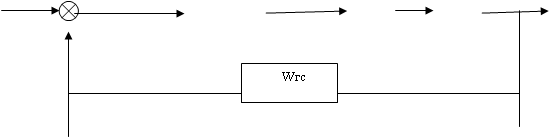
и коэффициент ![]() подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
подлежит определению непрерывно контур скорости также будет модифицирован (рис. 6.).
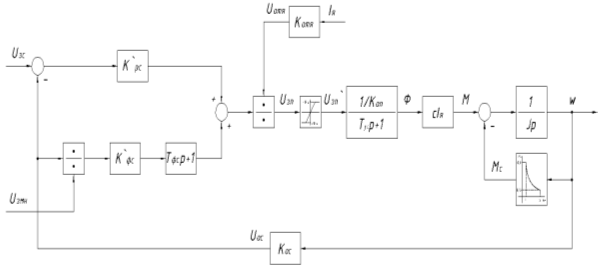
Рис. 6. Модифицированный контур регулирования скорости.
Коэффициент обратной связи по току якоря:
![]()
Отсюда следует:
![]()
Передаточная функция контура компенсирующего влияние нагрузки:
![]()
Коэффициент задания мощности нагрузки:
![]()
Откуда (с учётом принятых выше коэффициентов) имеем:
![]()
где
![]()
![]()
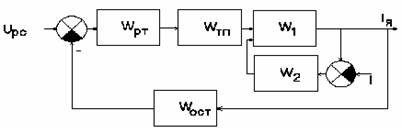
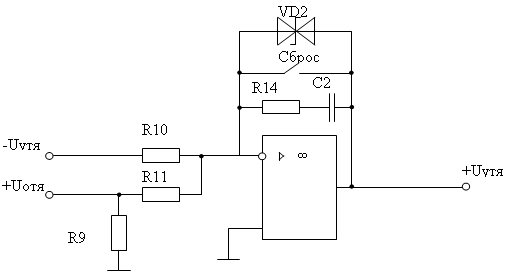
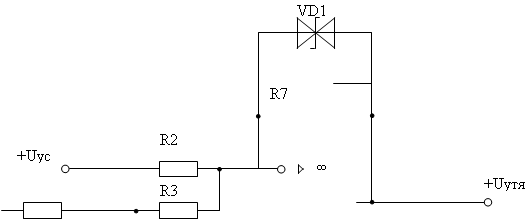
Структура системы управления стабилизатором напряжения в цепи якоря приведена на рис. 7.
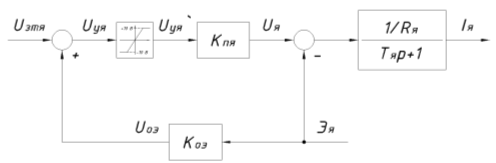
Рис. 7. Контур управления напряжением якоря.
Здесь:
![]()
Структурная схема всей системы управления и объекта приведена на рис. 8.
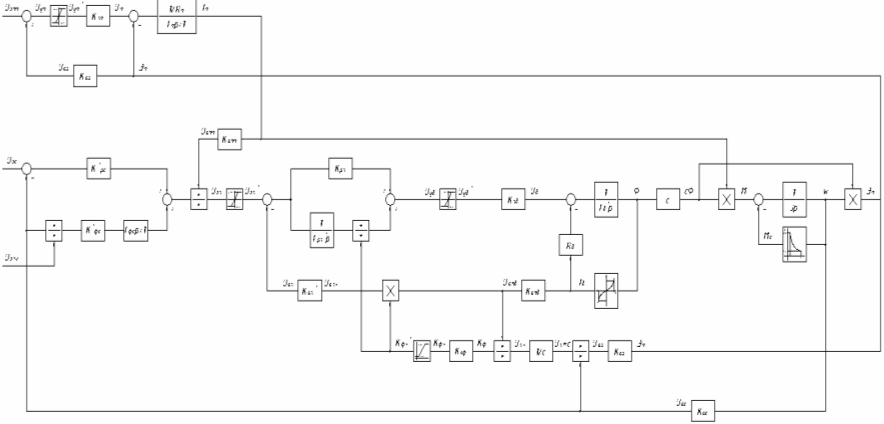
Рис. 8. Структурная схема системы управления и объекта.
Похожие работы

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
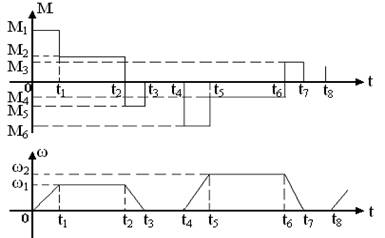
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
... При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит в общий блок системы управления, т.е. является отдельным её модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъём с ответной частью. Для удобства монтажа на передней панели ...
0 комментариев