Навигация
Моделирование процессов управления, определение и оценка показателей качества
11651
знак
1
таблица
29
изображений
3. Моделирование процессов управления, определение и оценка показателей качества
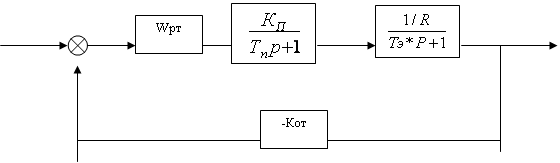
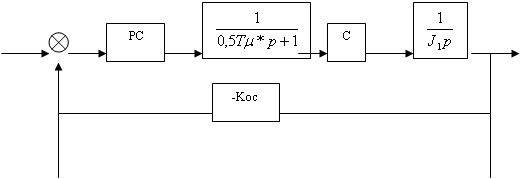
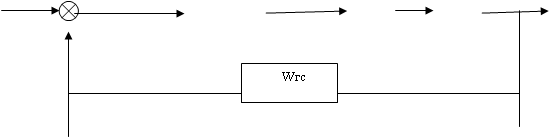
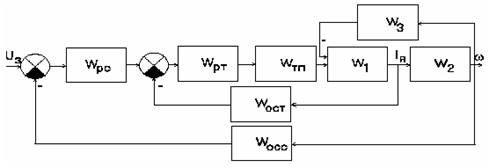
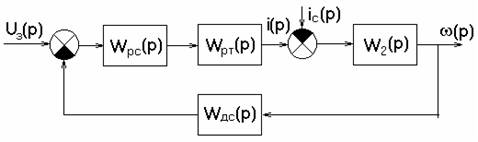
Модель объекта и системы управления в комплексе ![]() представлена на рис. 9.
представлена на рис. 9.
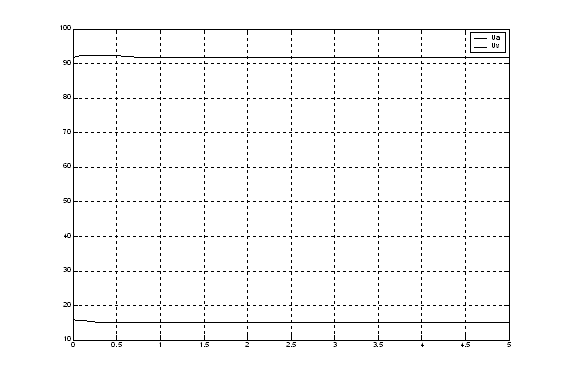
Моделирование будем проводить по нижеследующему алгоритму:
Пуск на номинальную скорость - ![]()
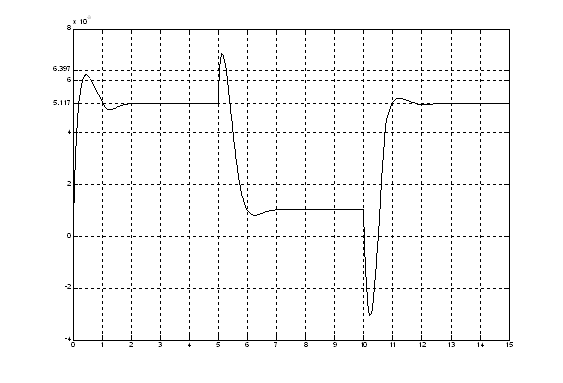
максимальный скачёк задания -![]() , (рис. 10 – рис. 14)
, (рис. 10 – рис. 14)
Проверка отработки задания
![]() (рис. 15 – рис. 10)
(рис. 15 – рис. 10)

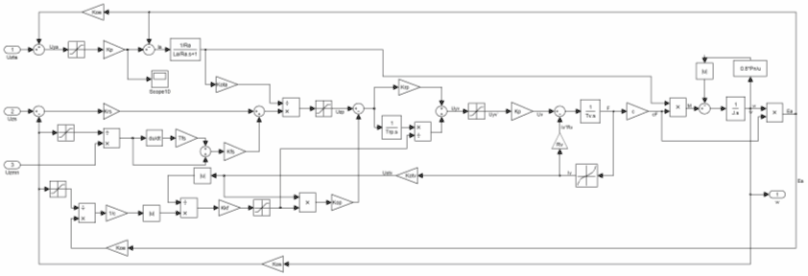
Рис. 9. Модель объекта и систему управления.
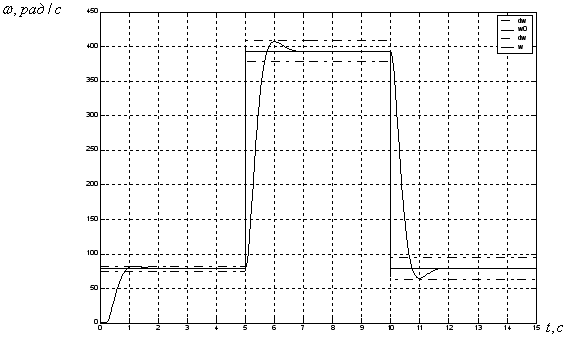
![]() Рис. 10. Зависимость
Рис. 10. Зависимость ![]() от времени.
от времени.

![]()
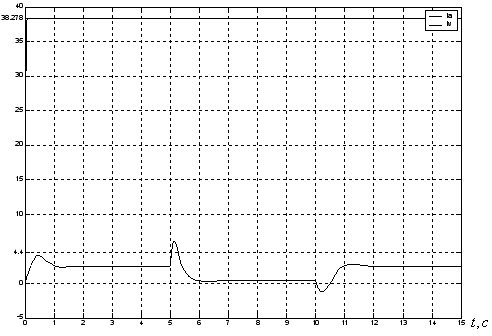
Рис. 11. Зависимость ![]() и
и ![]() от времени.
от времени.
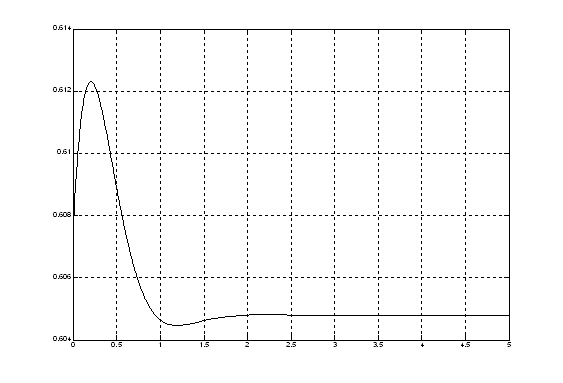
![]() Рис. 12. Зависимость
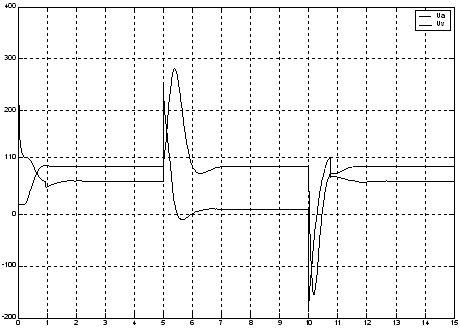
Рис. 12. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 13. Зависимость
Рис. 13. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 14. Зависимость
Рис. 14. Зависимость ![]() от времени.
от времени.
![]()
![]()
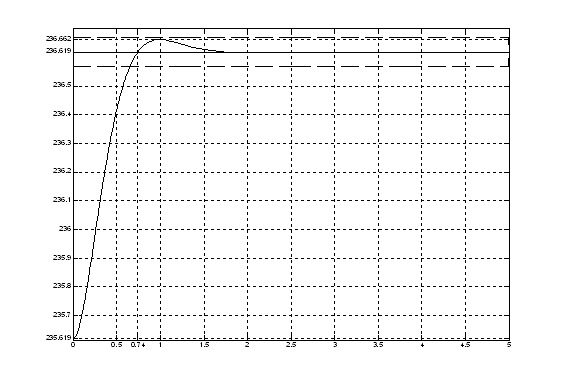
Рис. 15. Зависимость ![]() от времени.
от времени.
![]()
![]()
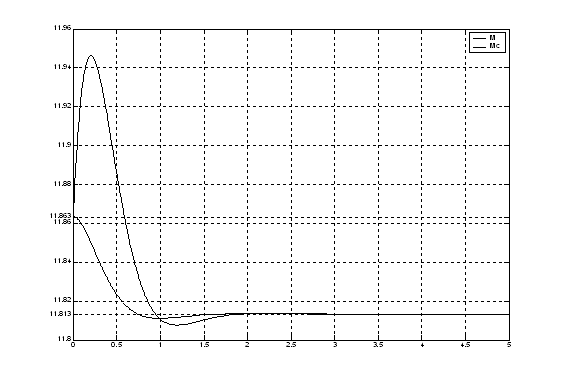
Рис. 16. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 17. Зависимость
Рис. 17. Зависимость ![]() от времени.
от времени.
![]()
![]() Рис. 18. Зависимость
Рис. 18. Зависимость ![]() и
и ![]() от времени.
от времени.
![]()
![]() Рис. 19. Зависимость
Рис. 19. Зависимость ![]() от времени.
от времени.
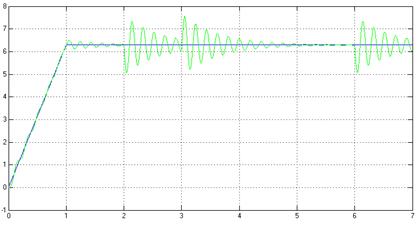
Для технического оптимума:
-перерегулирование составляет:
![]()
-время нарастания:
![]()
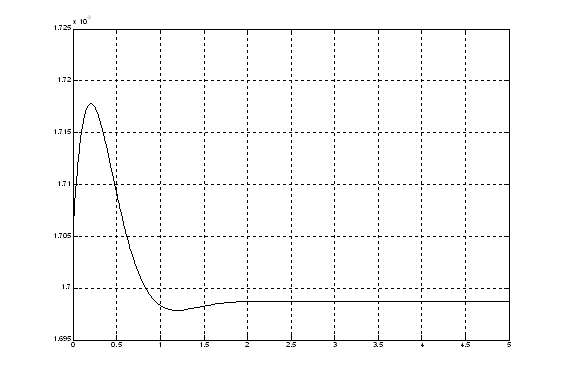
По результатам моделирования:
-перерегулирование составляет:
![]()
-время нарастания: ![]()
Статическая ошибка отсутствует.
Отсюда можно сделать вывод:
динамика и статика спроектированной системы полностью удовлетворяет требованиям технического задания.
Похожие работы

... сопротивления в цепи были равны, как на примере сумматора. (рис. 16). Рис.16. Принимаем R11=R12=R13=10kОм Заключение В ходе выполнения курсового проекта по дисциплине "Системы управления электроприводом" были получены важные навыки разработки типовых алгоритмов управления промышленными механизмами, выбора структуры системы регулирования, расчета требуемых параметров устройств. ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
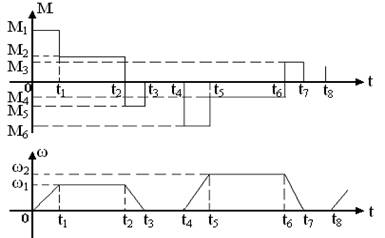
... транспорта сельского хозяйства и в быту. 1. Данные для расчета системы стабилизации скорости электропривода постоянного тока М1 = 74 Н·м t1 = 0,3 с t7 = 0,1 с М2 = 32 Н·м t2 = 53 с t8 = 2 с М3 = 48 Н·м t3 = 0,1 с ω1 = 79 с-1 М4 = - 19 Н·м t4 = 1 с ω2 = 158 с-1 М5 = - 55 Н·м t5 = 0,4 с D = 50/1 М6 = - 39 Н·м t6 = 50 с δ = 0,5% 2. Нагрузочная диаграмма и тахограмма ...
... При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит в общий блок системы управления, т.е. является отдельным её модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъём с ответной частью. Для удобства монтажа на передней панели ...
0 комментариев