Навигация
Момент силы относительно оси
35662
знака
9
таблиц
28
изображений
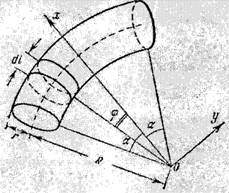
1.5. Момент силы относительно оси
Моментом силы относительно оси называется момент проекции этой силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью.
Момент считается положительным, если с положительного конца оси поворот, который сила стремится совершить, виден происходящим против хода часовой стрелки, и отрицательным – если по ходу часовой стрелки.
![]()
![]()
![]() . (1.3)
. (1.3)
Чтобы найти момент силы относительно оси, нужно (рис 1.17);
![]() 1. Провести плоскость перпендикулярную оси z.
1. Провести плоскость перпендикулярную оси z.
![]() 2. Спроецировать силу
2. Спроецировать силу ![]() на эту плоскость и вычислить величину проекции
на эту плоскость и вычислить величину проекции ![]() .
.
![]() 3. Провести плечо h из точки пересечения оси с плоскостью на линию действия проекции силы
3. Провести плечо h из точки пересечения оси с плоскостью на линию действия проекции силы ![]() и вычислить его длину.
и вычислить его длину.
![]() 4. Найти произведение этого плеча и проекции силы с соответствующим знаком /
4. Найти произведение этого плеча и проекции силы с соответствующим знаком /
Свойства момента силы относительно оси
Момент силы относительно оси равен нулю, если:
![]() 1.
1. ![]() , т.е. сила
, т.е. сила ![]() параллельна оси.
параллельна оси.
![]() 2. h=0 , т.е. линия действия силы пересекает ось.
2. h=0 , т.е. линия действия силы пересекает ось.
![]()
1.6. Момент пары сил
Пара сил оказывает на тело вращающее действие. Момент пары сил равен произведению одной силы на кратчайшее расстояние между линиями действия сил пары, которое называется плечом пары (рис.1.18)
![]() , (1.4)
, (1.4)
где: ![]() -силы, составляющие пару;
-силы, составляющие пару;
h - плечо пары
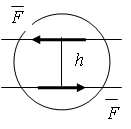
Рис.1.18.
Момент пары считают положительным, если силы ![]() стремятся вращать плечо
стремятся вращать плечо ![]() против хода часовой стрелки.
против хода часовой стрелки.
Свойства пары сил
1. Сумма проекций сил пары на любую ось равна нулю.
2. Не изменяя момента пары можно одновременно соответственно изменять значение сил и плечо пары.
3. Пару можно переносить в плоскости ее действия при этом действие пары на тело не изменится.
1.7. Тождественное преобразование систем сил
Преобразование может быть выполнено графическим или аналитическим способом.
1.7.1. Преобразование сходящейся системы сил
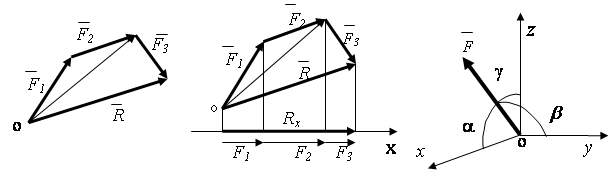
![]() Равнодействующая R двух сходящихся сил
Равнодействующая R двух сходящихся сил ![]() находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника.
находится на основании аксиомы о параллелограмме сил. (рис.1.9). Геометрическая сумма любого числа сходящихся сил может быть определена путем последовательного сложения двух сил (рис.1.19) – способ векторного многоугольника.
Вывод: система сходящихся сил (![]() n) приводится к одной равнодействующей силе
n) приводится к одной равнодействующей силе ![]() .
.
![]()
![]() Рис.1.19 Рис.1.20. Рис.1.21.
Рис.1.19 Рис.1.20. Рис.1.21.
Аналитически равнодействующая сила может быть определена через ее проекции на оси координат
![]() , (1.5 )
, (1.5 )
Согласно теореме: проекция равнодействующей на ось равна сумме проекций слагаемых сил на эту ось (рис.1.20). Rx = F1 x + F2 x + F3 x , или в общем виде
Rx = å Fkx(1.6)
С учетом (1.6) равнодействующая определяется выражением
![]() , (1.7)
, (1.7)
Направление вектора равнодействующей определяется косинусами углов между вектором ![]() и осями x, y, z (рис.1.20)
и осями x, y, z (рис.1.20)
![]() где
где ![]()
Похожие работы
... , а в ходе решения обрести уверенность, что ответ получен правильный. Для этого решение необходимо проверить, специалисты сказали бы – «провести экспертизу проекта». В пособии показано, как в задачах статики можно провести подобную экспертизу, то есть путем проверки убедиться в правильности решения. Общие методические указания Основная практическая задача статики - определение реакций связей, ...

... : Составить кинетические соотношения: Вычислим кинетическую энергию системы в конечном положении: Найдем сумму работ всех внешних сил на заданном перемещении: Для определения скорости воспользуемся уравнением: Ответ: 4. D19. Применение общего управления динамики к исследованию движения механической системы с одной степенью свободы Дано: ...
... Сербо «Сборник задач по теоретической механике», - М.: «Наука», 1977 г., - 320 с. И.В. Мещерский «Сборник задач по теоретической механике», - М.: «Наука», 1986 г., - 448 с. Л.П. Гречко, В.И. Сугаков, О.Ф. Томасевич, А.М. Федоренко «Сборник задач по теоретической физике», - М.: «Высшая школа» 1984 г., - 319 с. Студент-практикант: Филатов А.С.7 “Согласовано” “Утверждено” Преподаватель Джежеря ...

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...
0 комментариев