Навигация
2.2. Кинематика точки
2.2.1 Способы задания движения точки
Задать движение точки - значит задать изменение ее положения по отношению к выбранной системе отсчета. Существует три основных систем отсчета: векторная, координатная, естественная. Соответственно возможны три способа задания движения точки.
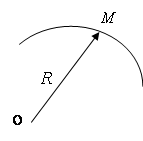
В векторной системе положение точки относительно начала отсчета задается радиус-вектором ![]() (рис.2.1). Закон движения
(рис.2.1). Закон движения ![]()
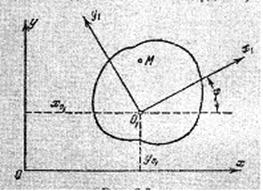
Положение точки в системе координат OXYZ задается тремя координатами X,Y,Z (рис.2.2). Закон движения – x = x( t ), y = y( t ), z = z( t ).
Положение точки в естественной системе отсчета задается расстоянием S от начала отсчета до этой точки вдоль траектории (рис.2.3). Закон движения – s = s( t ).
 | |||
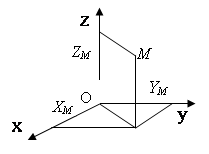 | |||
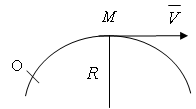
Рис.2.1 Рис. 2.2 Рис.2.3
Движение точки при естественном способе задания движения определено если известны:
1.Траектория движения.
2.Начало и направление отсчета дуговой координаты.
3.Уравнение движения.
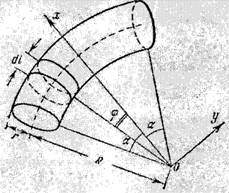
При естественном способе задания движения, в отличии от других способов, используются подвижные координатные оси, движущиеся вместе с точкой по траектории. Такими осями являются (рис. 2.4).
Касательная (![]() ) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
) – направлена в сторону возрастания дуговой координаты по касательной к траектории.
Главная нормаль (п) – направлена в сторону вогнутости кривой.
Бинормаль (в) – направлена перпендикулярно к осям t , n.
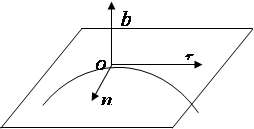
Рис. 2.4
2.2.2 Определение кинематических характеристик точки
Траектория точки
В векторной системе отсчета траектория описывается выражением ![]()
В координатной системе отсчета траектория определяется по закону движения точки и описывается выражениями z = f (x,y) - в пространстве, или y = f(x ) – в плоскости.
В естественной системе отсчета траектория задается заранее.
Скорость точки
Согласно определению (см. п. 2.1) скорость характеризует изменение во времени положения точки (тела) в пространстве.
Определение скорости точки в векторной системе координат
При задании движения точки в векторной системе координат отношение перемещения к интервалу времени ![]() называют средним значением скорости на этом интервале времени
называют средним значением скорости на этом интервале времени ![]() .
.
Принимая интервал времени бесконечно малой величиной, получают значение скорости в данный момент времени (мгновенное значение скорости)
 (2.1)
(2.1)
Вектор средней скорости ![]() направлен вдоль вектора
направлен вдоль вектора ![]() в сторону движения точки, вектор мгновенной скорости
в сторону движения точки, вектор мгновенной скорости ![]() направлен по касательной к траектории в сторону движения точки (рис.2.5).
направлен по касательной к траектории в сторону движения точки (рис.2.5).
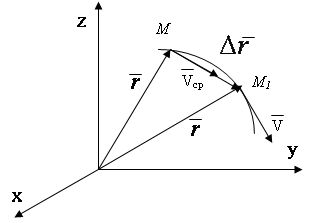
Рис.2.5
Вывод: скорость точки – векторная величина, равная производной от закона движения по времени.
Отметим и используем в дальнейших рассуждениях следующее свойство производной: производная от какой либо величины по времени определяет скорость изменения этой величины.
Определение скорости точки в координатной системе отсчета
На основании свойства производной определим скорости изменения координат точки


 (2.2)
(2.2)
Модуль полной скорости точки при прямоугольной системе координат будет равен
![]() (2.3)
(2.3)
Направление вектора скорости определяется косинусами направляющих углов

где ![]() - углы между вектором скорости и осями координат.
- углы между вектором скорости и осями координат.
Определение скорости точки в естественной системе отсчета
Скорость точки в естественной системе отсчета определяется как производная от закона движения точки
V=![]() (2.4)
(2.4)
Согласно предыдущим выводам вектор скорости направлен по касательной к траектории в сторону движения точки и в осях ![]() nb определяется только одной проекцией
nb определяется только одной проекцией ![]() .
.
Ускорение точки
По определению ускорение характеризует изменение скорости, т.е. скорость изменения скорости.
Ускорения точки в векторной системе отсчета
На основании свойства производной
 , (2.5 )
, (2.5 )
Вектор скорости может изменяться по модулю и направлению. Для определения приращения вектора ![]() совместим начала векторов
совместим начала векторов ![]() (рис.2.6). Вектор ускорения направлен по линии приращения вектора скорости, т. е. В сторону искривления траектории.
(рис.2.6). Вектор ускорения направлен по линии приращения вектора скорости, т. е. В сторону искривления траектории.
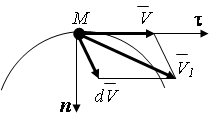
Рис.2.6
Ускорение точки в координатной системе отсчета
Ускорение изменения координат точки равно производной по времени от скоростей изменения этих координат
ax=![]() ; ay=
; ay=![]() ; az=
; az=![]() .
.
Полное ускорение в прямоугольной системе координат будет определяться выражением
а = ![]() , (2.6)
, (2.6)
Направляющие косинусы вектора ускорения
 .
.
Ускорение точки в естественной системе отсчета
Приращение вектора скорости![]()
![]() (рис.2.7)
(рис.2.7)![]() можно разложить на составляющие, параллельные осям естественной системы координат
можно разложить на составляющие, параллельные осям естественной системы координат
![]() , (2.7)
, (2.7)
Разделив левую и правую части равенства (2.7 ) на dt, получим,
![]() , (2.8)
, (2.8)
где:  - тангенциальное ускорение,
(2.9)
- тангенциальное ускорение,
(2.9)
 - нормальное ускорение, (вывод см .[1], п.43)
- нормальное ускорение, (вывод см .[1], п.43)
где R - радиус кривизны траектории в окрестности точки
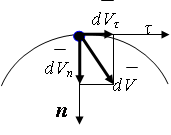
Рис. 2.7
Похожие работы
... , а в ходе решения обрести уверенность, что ответ получен правильный. Для этого решение необходимо проверить, специалисты сказали бы – «провести экспертизу проекта». В пособии показано, как в задачах статики можно провести подобную экспертизу, то есть путем проверки убедиться в правильности решения. Общие методические указания Основная практическая задача статики - определение реакций связей, ...

... : Составить кинетические соотношения: Вычислим кинетическую энергию системы в конечном положении: Найдем сумму работ всех внешних сил на заданном перемещении: Для определения скорости воспользуемся уравнением: Ответ: 4. D19. Применение общего управления динамики к исследованию движения механической системы с одной степенью свободы Дано: ...
... Сербо «Сборник задач по теоретической механике», - М.: «Наука», 1977 г., - 320 с. И.В. Мещерский «Сборник задач по теоретической механике», - М.: «Наука», 1986 г., - 448 с. Л.П. Гречко, В.И. Сугаков, О.Ф. Томасевич, А.М. Федоренко «Сборник задач по теоретической физике», - М.: «Высшая школа» 1984 г., - 319 с. Студент-практикант: Филатов А.С.7 “Согласовано” “Утверждено” Преподаватель Джежеря ...

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...
0 комментариев