Навигация
2.4. Сложное движение точки
В предыдущих параграфах рассматривалось движение точки относительно неподвижной системы отсчета, так называемое абсолютное движение. В практике встречаются задачи, в которых известно движение точки относительно системы координат, которая движется относительно неподвижной системы. При этом требуется определить кинематические характеристики точки относительно неподвижной системы.
Принято называть: движение точки относительно подвижной системы – относительным, движение точки вместе с подвижной системой – переносным, движение точки относительно неподвижной системы – абсолютным. Соответственно называют скорости и ускорения:
![]() -относительные;
-относительные;![]() - переносные;
- переносные; ![]() -абсолютные.
-абсолютные.
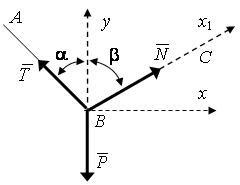
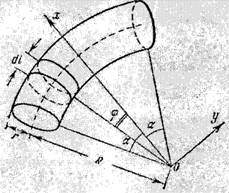
Согласно теореме о сложении скоростей абсолютная скорость точки равна векторной сумме относительной и переносной скоростей (рис.).
![]() , (2.20)
, (2.20)
Абсолютное значение скорости определяется по теореме косинусов
![]() , (2.21)
, (2.21)
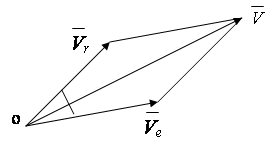
Рис.2.17
Ускорение по правилу параллелограмма определяется только при поступательном переносном движении
![]()
![]() , (2.22)
, (2.22)
При непоступательном переносном движении появляется третья составляющая ускорения, называемое поворотным или кориолисовым.
![]() , (2.23)
, (2.23)
где ![]()
Кориолисово ускорение численно равно![]()
![]() ,
,
где a – угол между векторами ![]() и
и ![]()
Направление вектора кориолисова ускорения удобно определять по правилу Н.Е. Жуковского: вектор ![]() спроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
спроектировать на плоскость, перпендикулярную оси переносного вращения, проекцию повернуть на 90 градусов в сторону переносного вращения. Полученное направление будет соответствовать направлению кориолисова ускорения.
2.5 Вопросы для самоконтроля по разделу
1. В чем состоят основные задачи кинематики? Назовите кинематические характеристики.
2. Назовите способы задания движения точки и определение кинематических характеристик.
3. Дайте определение поступательного, вращательного вокруг неподвижной оси, плоскопараллельного движения тела.
4. Как задается движение твердого тела при поступательном, вращательном вокруг неподвижной оси и плоскопараллельном движении тела и как определяется скорость и ускорение точки при этих движениях тела?
3. Динамика
3.1 Задачи динамики
В динамике решаются два типа задач. Первая состоит в определении действующих сил при заданном законе движения материального объекта (точки или системы). Вторая задача обратная первой: определяется закон движения материального объекта при известных действующих на него силах.
3.2. Основные понятия динамики
Инерционность - свойство материальных тел сохранять состояние покоя или равномерного прямолинейного движения, пока внешние силы не изменят этого состояния.
Масса - количественная мера инерционности тела. Единица измерения массы - килограмм (кг).
Материальная точка - тело, обладающее массой, размерами которого при решении данной задачи пренебрегают.
Центр масс механической системы - геометрическая точка, координаты которой определяются формулами.
 (3.1 )
(3.1 )
где mk, xk, yk, zk- масса и координаты k - той точки механической системы,
m - масса системы.
В однородном поле тяжести положение центра масс совпадает с положением центра тяжести.
Момент инерции материального тела относительно оси – количественная мера инертности при вращательном движении.
Момент инерции материальной точки относительно оси равен произведению массы точки на квадрат расстояния точки от оси.
JZ = m×r2 (3.2)
Момент инерции системы (тела ) относительно оси равен арифметической сумме моментов инерции всех точек.
JZ = åmk×rk2 (3.3 )
Сила инерции материальной точки - векторная величина, равная по модулю произведению массы точки на модуль ускорения и направленная противоположно вектору ускорения
![]() (3.4)
(3.4)
Сила инерции материального тела - векторная величина, равная по модулю произведению массы тела на модуль ускорения центра масс тела и направленная противоположно вектору ускорения центра масс
![]() , (3.5)
, (3.5)
где ![]() - ускорение центра масс тела.
- ускорение центра масс тела.
Элементарный импульс силы - векторная величина ![]() , равная произведению вектора силы
, равная произведению вектора силы ![]() на бесконечно малый промежуток времени dt
на бесконечно малый промежуток времени dt
![]() , (3.6)
, (3.6)
Полный импульс силы за Dt равен интегралу от элементарных импульсов
 (3.7)
(3.7)
Элементарная работа силы - скалярная величина dA, равная скалярному произведению вектора силы ![]() на бесконечно малое перемещение d
на бесконечно малое перемещение d![]() .
.
Скалярное произведение векторов равно произведению их модулей на косинус угла между направлениями векторов.
dA = F×ds×cosa, (3.8)
где a - угол между направлениями векторов перемещения и силы.
Работа силы ![]() на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению.
на конечном перемещении точки её приложения равна интегралу от элементарной работы, взятому по перемещению.
 (3.9)
(3.9)
Единица измерения работы - Джоуль (1 Дж=1 Н×м).
Количество движения материальной точки - векторная величина ![]() , равная произведению массы m на её скорость
, равная произведению массы m на её скорость ![]() .
.
![]() =
= ![]()
![]() (3.10)
(3.10)
Количество движения механической системы ![]() равно векторной сумме количества движения её точек.
равно векторной сумме количества движения её точек.
![]() (3.11)
(3.11)
или с учетом формул ( 3.1 ).
![]() , (3.12)
, (3.12)
где: m- масса механической системы,
![]() - вектор скорости центра масс системы.
- вектор скорости центра масс системы.
Кинетическая энергия материальной точки - скалярная величина Т, равная половине произведения массы точки на квадрат её скорости.
T=![]() (3.13)
(3.13)
Кинетическая энергия механической системы равна сумме кинетических энергий всех её точек.
![]() (3.14)
(3.14)
Похожие работы
... , а в ходе решения обрести уверенность, что ответ получен правильный. Для этого решение необходимо проверить, специалисты сказали бы – «провести экспертизу проекта». В пособии показано, как в задачах статики можно провести подобную экспертизу, то есть путем проверки убедиться в правильности решения. Общие методические указания Основная практическая задача статики - определение реакций связей, ...

... : Составить кинетические соотношения: Вычислим кинетическую энергию системы в конечном положении: Найдем сумму работ всех внешних сил на заданном перемещении: Для определения скорости воспользуемся уравнением: Ответ: 4. D19. Применение общего управления динамики к исследованию движения механической системы с одной степенью свободы Дано: ...
... Сербо «Сборник задач по теоретической механике», - М.: «Наука», 1977 г., - 320 с. И.В. Мещерский «Сборник задач по теоретической механике», - М.: «Наука», 1986 г., - 448 с. Л.П. Гречко, В.И. Сугаков, О.Ф. Томасевич, А.М. Федоренко «Сборник задач по теоретической физике», - М.: «Высшая школа» 1984 г., - 319 с. Студент-практикант: Филатов А.С.7 “Согласовано” “Утверждено” Преподаватель Джежеря ...

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...
0 комментариев