Получение квадратичной модели
Преобразование модели в форме Ассео
Условие правомерности децентрализации
Исследование процессов в системе и анализ количественных свойств системы
Построение графиков кривой разгона дискретной системы
Построение графиков кривой разгона нелинейной системы
Пассивная идентификация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование надежного регулятора
Вычислить критерий оптимальности в системе
Навигация
Получение квадратичной модели
Конструирование многомерных регуляторов смесительного бака
17832
знака
10
таблиц
44
изображения
1.1.3 Получение квадратичной модели
Уравнение квадратичной системы имеет вид:
![]()
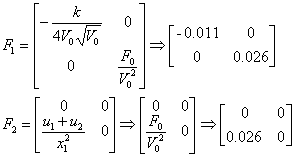
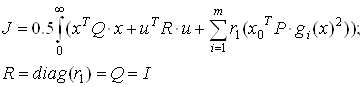
Матрицы с подстановкой номинального режима:
1.1.4 Запись билинейной модели
Уравнение билинейной системы записывается в виде

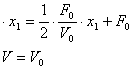
Приняв допущение, что критерий оптимальности в форме О.А. Красовского
регулятор определяется по зависимости ![]()
Где матрица определена как ![]()
1.1.5 Линеаризованная модель
Линеаризуем зависимость ![]() , разложив ее на ряд Тейлора.
, разложив ее на ряд Тейлора.
![]()
![]()
![]()
![]()
С учетом ранее изложенного запишем:
![]()
![]() ; (т.к.
; (т.к. ![]() ), где
), где ![]() ;
;
![]()
Припустив в случае остатка ![]() . Тогда, подставив производную
. Тогда, подставив производную ![]() , получим
, получим
![]()
![]()
![]()
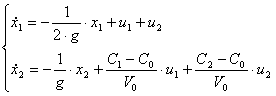
Представим систему в матричной форме:
![]()
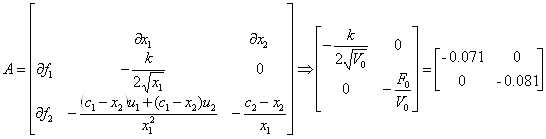
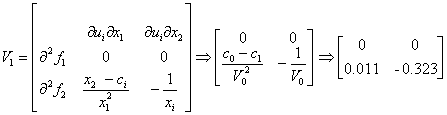
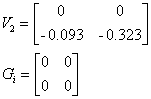
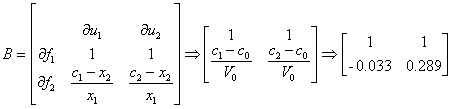
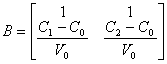
Тогда матрицы А и В запишутся в виде
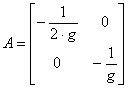 ,
, 
Для определения матрицы С необходимо установить связь между векторами x и y. Т.к. ![]() ,
, ![]() , то
, то
![]() ;
; ![]()
![]() , то
, то ![]()
Тогда
![]()
Система будет иметь вид
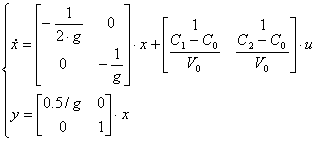
Коэффициенты модели системы:

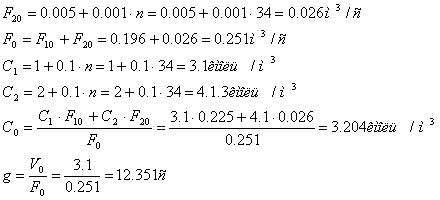
![]()
![]()
![]()
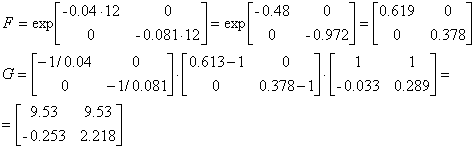
1.1.6 Модель в дискретном времени
Система в дискретном времени имеет вид:
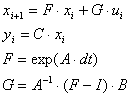
dt= 24 c.
![]()
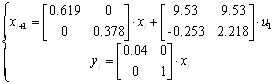
Зададим ![]() ,
, ![]() , получим значения на выходах дискретной системы.
, получим значения на выходах дискретной системы.
Таблица 4 Значение выходов дискретной системы
| Возмущение | Реакция выхода системы y(t) | |||||||
| u1=0.01 u2=0 | y1 y2 | 0 0 | 0.00384 -0.00254 | 0.00624 -0.00352 | 0.0077 -0.03896 | 0.00859 -0.004038 | 0.00913 -0.00409 | 0.00947 -0.00411 |
| время t, с | 0 | 12 | 24 | 37 | 49 | 61 | 74 | |
Похожие работы
... выставляться с понижающим коэффициентом 0,8. 7. Студент должен быть вежливым, терпимым, открытым, доброжелательным к преподавателям и студентам. Тема 1. Введение. Структура и содержание дисциплины «Основы патентоведения и рационализации» Цель: знакомство с задачами изучаемой дисциплины, с основными понятиями и определениями. План: 1.1 Изобретательство – основа развития ...
0 комментариев