Получение квадратичной модели
Преобразование модели в форме Ассео
Условие правомерности децентрализации
Исследование процессов в системе и анализ количественных свойств системы
Построение графиков кривой разгона дискретной системы
Построение графиков кривой разгона нелинейной системы
Пассивная идентификация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование надежного регулятора
Вычислить критерий оптимальности в системе
Навигация
Пассивная идентификация
Конструирование многомерных регуляторов смесительного бака
17832
знака
10
таблиц
44
изображения
1.4.2 Пассивная идентификация
Для дискретной формы системы (F, G, C) из пункта 3. 1. провести пассивную идентификацию системы, предполагая, что вектор входа изменяется соответственно таблице:
Таблица 7 Значение вектора входа для пассивной идентификации.
| Такт, n | 0 | 1 | 2 | 3 | 4 | 5 |
| U(n) | 0.01 | 0 | 0 | 0.04 | 0 | 0 |
| 0 | 0.01 | 0.02 | 0 | 0.03 | 0 |
![]()
![]()
![]()
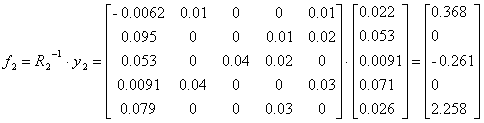
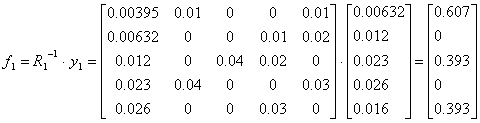
Используя матрицы системы в дискретной форме для заданных значений вектора входа, рассчитаем значения вектора выхода

Результаты расчета сведем в таблицу:
| Такт, n | 1 | 2 | 3 | 4 | 5 | 6 |
| y(n) | 0.003935 | 0.006321 | 0.012 | 0.023 | 0.026 | 0.016 |
| -0.0026 | 0.022 | 0.053 | 0.0091 | 0.071 | 0.026 |
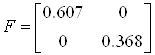
Используя данные эксперимента (Таблица 8) можем приступить непосредственно к определению параметров идентифицированной системы
Тогда
![]()
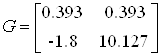
Для проверки идентификации найдем коэффициент передачи системы
![]()
Система идентифицирована, верно
Похожие работы
... выставляться с понижающим коэффициентом 0,8. 7. Студент должен быть вежливым, терпимым, открытым, доброжелательным к преподавателям и студентам. Тема 1. Введение. Структура и содержание дисциплины «Основы патентоведения и рационализации» Цель: знакомство с задачами изучаемой дисциплины, с основными понятиями и определениями. План: 1.1 Изобретательство – основа развития ...
0 комментариев