Получение квадратичной модели
Преобразование модели в форме Ассео
Условие правомерности децентрализации
Исследование процессов в системе и анализ количественных свойств системы
Построение графиков кривой разгона дискретной системы
Построение графиков кривой разгона нелинейной системы
Пассивная идентификация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование надежного регулятора
Вычислить критерий оптимальности в системе
Навигация
Построение графиков кривой разгона нелинейной системы
Конструирование многомерных регуляторов смесительного бака
17832
знака
10
таблиц
44
изображения
1.3.3 Построение графиков кривой разгона нелинейной системы
Данные для построения графиков получены в пункте 1.1.2
Для первого выхода пользуемся таблицей 1. Получившиеся графики можем сопоставить с графиками полученным в пункте 1.3.1, введя поправку на начальное значение параметра

Рисунок 11 – Реакция первого выхода на возмущения u1(t) в пункте 1.3.1
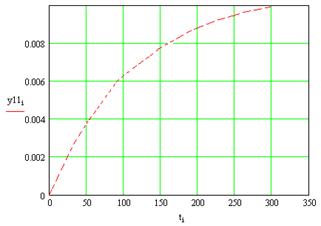
Рисунок 12 – Реакция первого выхода на возмущение для линеаризованной системы
Легко видеть, что эти график совпадают, что говорит о том, что линеаризация по первому выходу проведена на приемлемом уровне
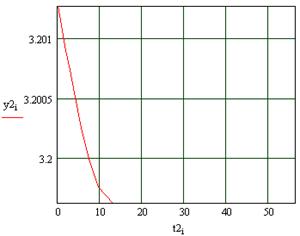
Рисунок 14 – Реакция второго выхода на возмущения u1(t) полученного в пункте 1.3.1

Рисунок 13 – Реакция второго выхода на возмущения для линеаризованной системы
В данном случае имеет место погрешность которую можно связать с ошибкой вносимой кусочно – линейной аппроксимации.
1.3.4 Установившиеся состояния системы
Вычислить постоянное значение состояния системы в условиях


Т.к. установившееся значение предполагает отсутствие динамики, то систему можно записать в следующем виде
![]()
1.4 Идентификация многомерной математической модели по данным эксперимента
1.4.1 Активная идентификация
Для дискретной формы системы (F, G, C) из пункта 3. 1. провести реализацию системы.
Запишем систему в виде:
![]()
![]()
![]()
![]()
Подавая импульс по первому входу, рассчитаем:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Теперь имея экспериментальные данные, сгруппировав их в матрицы H и H1 можем приступить к их обработки.
![]()
![]()
![]()
![]()
Из собственных векторов от (![]() ) и (
) и (![]() ) построим:
) построим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для проверки идентификации найдем коэффициент передачи системы
![]()
Коэффициент передачи, вычисленный по исходным матрицам
![]()
![]()
![]()
![]()
Можно сделать вывод о том, что система идентифицирована, верно
Похожие работы
... выставляться с понижающим коэффициентом 0,8. 7. Студент должен быть вежливым, терпимым, открытым, доброжелательным к преподавателям и студентам. Тема 1. Введение. Структура и содержание дисциплины «Основы патентоведения и рационализации» Цель: знакомство с задачами изучаемой дисциплины, с основными понятиями и определениями. План: 1.1 Изобретательство – основа развития ...
0 комментариев