Получение квадратичной модели
Преобразование модели в форме Ассео
Условие правомерности децентрализации
Исследование процессов в системе и анализ количественных свойств системы
Построение графиков кривой разгона дискретной системы
Построение графиков кривой разгона нелинейной системы
Пассивная идентификация
Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
Конструирование надежного регулятора
Вычислить критерий оптимальности в системе
Навигация
Вычислить критерий оптимальности в системе
Конструирование многомерных регуляторов смесительного бака
17832
знака
10
таблиц
44
изображения
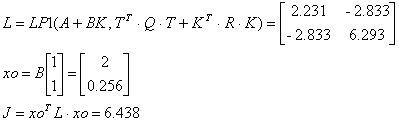
3.2 Вычислить критерий оптимальности в системе
Величина критерия с удельным регулятором вычисляется
![]()
![]()
Отклонение параметров на 10 процентов
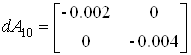
![]()
![]()
Отклонение параметров на 5 процентов
![]()
![]()
![]()
Матрицы чувствительности будут рассчитаны в пункте 3.4:
![]()
![]()
![]()
В конечном счете, получаем
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.3 Оценить потерю качества от децентрализации
Коэффициент передачи децентрализованного регулятора найден в пункте 2.5
![]()
Для определения критерия
3.4 Вычислить чувствительность системы
dJ/dA, dJ/dВ, dJ/dС, dJ/dК для системы (А1,В, С), где А1=А+В*К, К=![]() *Р.
*Р.
Матрицы А1 и P (решение уравнения Риккати) Pлп (решение уравнения Ляпунова ) рассчитывались ранее
![]()
![]()
![]()
Для расчета матрицы V следует решить уравнение Ляпунова вида:
А1*V+V* А1+I=0
Таким образом :
![]() ;
; ![]() ;
;
Все необходимые составляющие для расчета чувствительности у нас есть:
dJ/dA=2∙P∙V==![]() ;
;
dJ/dВ=2∙P∙V∙![]() =
=![]() ;
;
dJ/dС=2∙![]() ∙
∙![]() ∙P∙V+2∙
∙P∙V+2∙![]() ∙K∙V=
∙K∙V=![]() ;
;
dJ/dК =2∙K∙V+2∙![]() ∙P∙V=
∙P∙V=![]()
3.5 Анализ робастности системы с надежным регулятором
Матрицы отклонения начальной системы
![]()
![]()
![]()
То есть аа=0.0081; bb=0.0289; cc=0.004.
Подставляя значения, полученные в пункте 2.6
![]()
в уравнение Scherzinger найдем из нее новую матрицу

Т.к. определенная матрица положительно определенная
![]()
то сконструированная система робастная поэтом стационарная и при изменении параметров в расчетных диапазонах величина критерия изменяется очень мало.
3.6 Решение обратной задачи конструирования
Записав расцеплояющей регулятор в виде
![]()
Далее используя соотношение
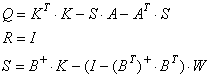
где W – произвольная матрица выбирается из условия S>0

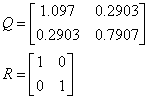
![]()
В конечном счете, получаем
4. Результат вспомогательных расчетов
1.Решение уравнения Риккати первого типа
Заданы матрицы
![]()
![]()
Сформируем матрицу М
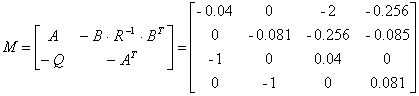
Найдем ее собственные значения
![]()
Выполним преобразование подобия
![]()
![]()
![]()
Решение уравнения Риккати
![]()
2.Решение уравнения Ляпунова
![]()
![]()

![]()
3. Вычисление матричной экспоненты

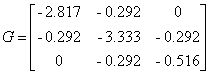
4.Опеделение Фробениусовой матрицы
![]()
![]()
![]()
![]()
![]()
5. Определение Вандермодовой матрицы
Выводы
Исследован технический объект – смесительный бак. Получен спектр модели: линейная, нелинейная, экспериментальная и аналитическая модель. Проведены эквивалентное аппроксимационое преобразование модели агрегата
Исследованы качественные и количественные свойства системы. Разработаны регуляторы управления объектом: П. – регулятор;
апериодический регулятор; надежный регулятор; блочно – иерархический регулятор; регулятор для билинейной и для нелинейной модели; программный регулятор; регулятор с компенсатором взаимосвязей. А также компенсаторы возмущений и компенсаторы на задании.
Проанализированы процессы в сконструированной системе с регулятором в качественном и количественном отношении (построен процесс в системе с регулятором, вычислен критерий оптимальности, проанализирована робастность, решена обратная задачи конструирования ).
На основании данного анализа можно сделать вывод о том, что наиболее подходящим регулятором для рассмотренной системы является оптимальный П. – регулятор. Хотя он и обладает некоторым перерегулированием, имеет небольшую статическую ошибку (при отсутствии компенсатора на задание), однако все эти недостатки компенсируются его простотой в установке и обслуживании. Помимо этого он обладает наименьшим временем переходного процесса, неплохим показателем критерия оптимальности. В силу своей простоты он является более надежным в том плане, что вероятность выхода из строя самого регулятора мала.
Литература
1. Стопакевич А.А., Методические указания к практическим занятиям по курсу « Основы системного анализа и теория систем » для бакалавров по автоматики. – Одесса: ОНПУ, 1997.
2. Стопакевич А.А. Сложные системы: анализ, синтез, управление. – Одесса: ОНПУ 2004
Похожие работы
... выставляться с понижающим коэффициентом 0,8. 7. Студент должен быть вежливым, терпимым, открытым, доброжелательным к преподавателям и студентам. Тема 1. Введение. Структура и содержание дисциплины «Основы патентоведения и рационализации» Цель: знакомство с задачами изучаемой дисциплины, с основными понятиями и определениями. План: 1.1 Изобретательство – основа развития ...
0 комментариев