Навигация
Исследование рычажного и зубчатого механизмов
15081
знак
2
таблицы
12
изображений
Введение
Курсовая работа включает в себя исследование рычажного и зубчатого механизмов.
Исследование рычажного механизма составляет наибольший по объёму раздел курсовой работы по теории машин и механизмов. В работе рассматривается четырёхзвенный механизм со степенью подвижности равной единице и вращающимся входным звеном (кривошип). Выходным звеном является ползун.
Исследование рычажного механизма включает три этапа:
1. структурный анализ механизма.
2. кинематический анализ
3. анализ динамики установившегося движения
Синтез кинематической схемы механизма состоит в определении некоторых постоянных его параметров, удовлетворяющих заданным структурным, кинематическим и динамическим условиям, при этом одна часть этих параметров может быть задана, а другая должна быть определена.
1.Анализ рычажного механизма
1.1 Структурный анализ рычажного механизма
1.1.1 Структурный анализ на уровне звеньев и кинематических пар
Задачи:
1.Анализ строения механизма на уровне звеньев и кинематических пар и подсчет степени подвижности.
2. Анализ строения механизма на уровне структурных групп.
Исходные данные:
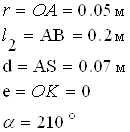
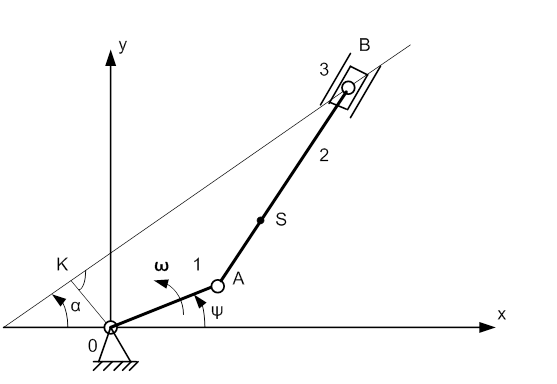
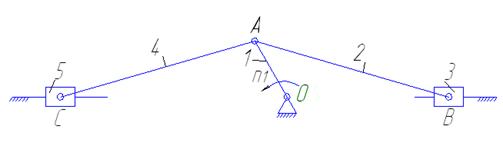
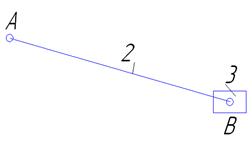
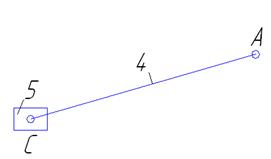
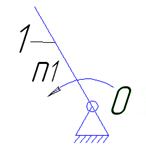
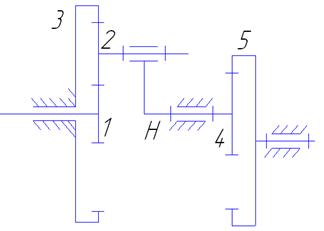
Рисунок 1 - Схема механизма
Допущения: При выполнении данного раздела курсовой работы воспользуемся рядом допущений:
1. Независимо от особенностей конструктивного выполнения, все шарнирные соединения считаем вращательными кинематическими парами, а все соединения, допускающие прямолинейное относительное движение – поступательными парами.
1.1.2 Анализ на уровне звеньев и кинематических пар. (Определяем общее количество звеньев и количество подвижных звеньев).
N=4 – количество звеньев;
n=3 - количество подвижных звеньев.
Определяем количество и виды кинематических пар.
Р5=4.
Таблица I - Таблица звеньев и кинематических пар механизма
| № пары | Обозначение пары | Название пары | Класс пары | Звенья |
| 1 | O | Вращательная | 5 | 0-стойка,1-кривошшип |
| 2 | A | Вращательная | 5 | 1-кривошшип,2-шатун |
| 3 | B | Вращательная | 5 | 2-шатун,3-ползун |
| 4 | B1 | Поступательная | 5 | 3-ползун,0-стойка |
Степень подвижности вычисляем по формуле Чебышева.
W=3n-2p5
W=3*3-2*4=1
Степень подвижности механизма равна 1, что свидетельствует о наличии только одного входного звена (звено 1). Если этому звену задать движение с некоторой угловой скоростью, то все остальные звенья механизма будут совершать строго определенные движения.
Похожие работы

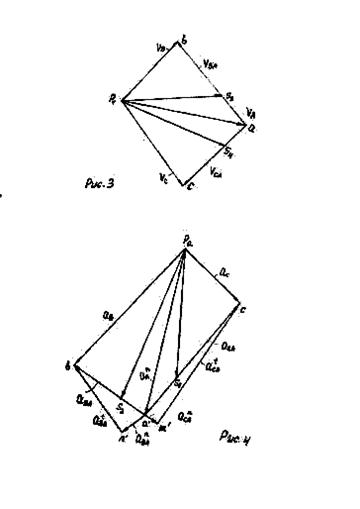
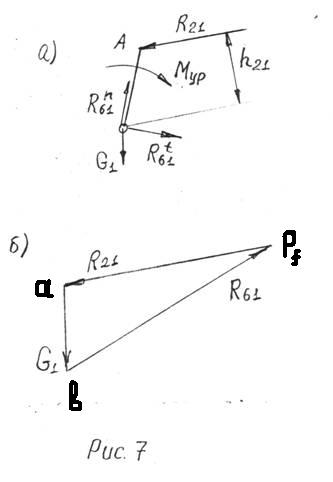
... отрезка "ав". Соединив точки S2 и S4 с полюсом плана скоростей получим векторы скоростей этих точек, а величина скоростей определится из соотношений: . Построенный план скоростей для механизма компрессора позволяет определить угловые скорости звеньев 2 и 4 в их вращательном движении. Как уже говорилось, отрезок плана скоростей ав (вектор) обозначает скорость точки "В" относительно точки ...
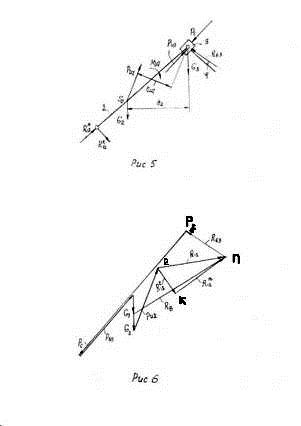
... B[44] = 220.000 TETA[44] = 0.0 R[45] = 52.000 B[45] = 220.000 TETA[45] = 0.0 R[46] = 52.000 B[46] = 360.000 TETA[46] = 0.0 6. Силовое исследование рычажного механизма. 6.1 Задачи силового исследования. При силовом исследовании решаются следующие задачи Определение сил действующих на звенья механизма. Определение реакций в кинематических ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... , - масса маховика, кг - плотность материала, (материал-Сталь 45) - ширина маховика, м - диаметр маховика, м ,м (2,23) где, - коэффициент (0,1÷0,3), м м кг 3. Силовой анализ рычажного механизма 3.1 Построение плана скоростей для расчётного положения Расчётным положением является положение №11. Построение плана скоростей описано в разделе №2. ...
0 комментариев