Навигация
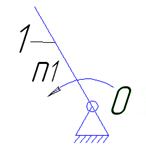
Определяем число зубьев планетарной ступени
15081
знак
2
таблицы
12
изображений
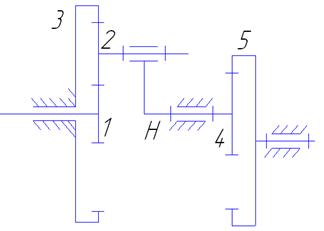
2.1.2 Определяем число зубьев планетарной ступени
![]() (1)
(1)
![]() (2)
(2)
 (3)
(3)
![]() (4)
(4)
2.1.3 Условие соосности
![]() (5)
(5)
![]() (6)
(6)
Подставляем выражение (6) в передаточное отношение первого колеса с водилом при остановленном третьем колесе
![]()
Подставляя числовые данные
![]() (7)
(7)
![]()
![]()
Принимаем число зубьев второго колеса равным 39
Определяем количество зубьев третьего колеса
2.1.4 Определение количества саттелитов
Определяем количество зубьев третьего колеса:
![]()
 (8)
(8)
2.1.5 Условие сборки
![]() (9)
(9)
определяем так, чтобы число в числителе делилось нацело и, исходя из максимального числа сателлитов, таким условиям отвечает: n=3
2.1.6 Определеие диаметров зубчатых колес:
![]() , (10)
, (10)
где m-модуль числа зубьев; z-количество зубьев
![]()
![]()
![]()
![]()
![]()
![]()
2.1.7 Определяем угловую и линейную скорости:
![]() (11)
(11)
![]() (12)
(12)
2.1.8 Выбор масштабных коэффициентов
![]()
![]()
![]()
2.1.9 Определяем погрешность
 (13)
(13)
![]() (14)
(14)
![]() (15)
(15)
![]() (16)
(16)
![]()
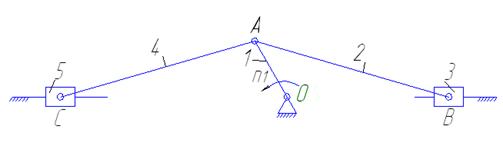
2.1.10 Построение плана линейных скоростей

Рисунок 9 - План линейных скоростей
Определили линейную скорость точки А. Пусть скорость точки изображает отрезок ![]() , тогда, соединяя
, тогда, соединяя ![]() с мгновенным центром
с мгновенным центром ![]() вращения сателлита, получают линию
вращения сателлита, получают линию ![]() распределения скоростей сателлита. С помощью линии
распределения скоростей сателлита. С помощью линии ![]() определяем скорость
определяем скорость ![]() в центре сателлита. Такую же скорость имеет конец
в центре сателлита. Такую же скорость имеет конец ![]() . Соединяя точку
. Соединяя точку ![]() с центром вращения
с центром вращения ![]() водила, получаем линию распределения скоростей водила. В точке
водила, получаем линию распределения скоростей водила. В точке ![]() скорость колеса 1 равна скорости
скорость колеса 1 равна скорости ![]() сателлита. Соединяя точку
сателлита. Соединяя точку ![]() с центром вращения
с центром вращения ![]() колеса 1, получаем линиюраспределения скоростей 1 колеса. Продлевая линию
колеса 1, получаем линиюраспределения скоростей 1 колеса. Продлевая линию![]() проходящею через центр
проходящею через центр ![]() , определяем скорость
, определяем скорость ![]() в центре зацепления 4 и 5 зубчатого колеса (т.к. состовляют с водилом одно звено). Соединяя
в центре зацепления 4 и 5 зубчатого колеса (т.к. состовляют с водилом одно звено). Соединяя ![]() с центром вращения 5 зубчатого колеса, получаем линию
с центром вращения 5 зубчатого колеса, получаем линию ![]() распределения скоростей 5-го зубчатого колеса.
распределения скоростей 5-го зубчатого колеса.
2.1.11 Построение плана угловых скоростей
Для этого задаемся расстоянием lω1=105мм, и переносим с плана линейных скоростей планы скоростей звеньев 1,2,H,5. Отрезки плана угловых скоростей 0-1,0-H,0-2 и 0-5 пропорциональны угловым скоростям соответствующих звеньев.
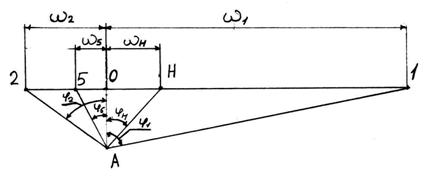
Рисунок 10 - План угловых скоростей
Определили угловую скорость ![]() первого зубчатого колеса. Пусть угловая скорость первого зубчатого колеса изображает отрезок
первого зубчатого колеса. Пусть угловая скорость первого зубчатого колеса изображает отрезок ![]() с учетом масштабного коэффициента
с учетом масштабного коэффициента ![]() . Затем параллельно
. Затем параллельно ![]() (из плана линейных скоростей) через точку
(из плана линейных скоростей) через точку ![]() проводим прямую до пересечения с нормалью из точки
проводим прямую до пересечения с нормалью из точки ![]() , из полученной точки
, из полученной точки ![]() проводим лучи, параллельно линиям распределения скоростей:
проводим лучи, параллельно линиям распределения скоростей: ![]() ,
, ![]() ,
, ![]() . Отрезки, отсекаемы этими лучами на горизонтальной прямой, оказываются графическими значениями угловых скоростей
. Отрезки, отсекаемы этими лучами на горизонтальной прямой, оказываются графическими значениями угловых скоростей ![]() ,
, ![]() ,
, ![]() .
.
Вывод: При синтезировании зубчатого зацепления был проведен расчет геометрических размеров т.е. были определены количество зубьев колёс и их диаметры, также была определена погрешность, которая составила 3.87%.:
Заключение
В данном курсовом проекте по теории машин и механизмов был выполнен анализ рычажного механизма; в структурном анализе были рассмотрены и найдены особенности строения механизма – степень подвижности, входное звено, группы Ассура которые входят в механизм, класс механизма; определяющие последовательность его кинематические и динамические исследования.
В кинематическом анализе исследовалось движение механизма в геометрическом аспекте. Было проанализировано движение выходного звена (ползун), найден рабочий ход механизма, при этом ползун находится в крайнем правом положении, конец рабочего хода и начало холостого хода, при этом ползун находится в крайнем левом положении. Так же были построены функции, описывающие преобразование движения в механизме.
В анализе динамики установившегося движения для построения динамической модели машины и определение истинного закона движения. Оценив неравномерность хода машины, мы вводим в машину маховик, для того чтобы снизить инерционную нагрузку и таким образом повысить долговечность машины
Список литературы
1.Артоболевский И. И. Теория механизмов и машин, М; Наука, 1975
2.Гуляев К.И. , Заморцев Г.Б. Расчет теории эвольвентной цилиндрической зубчатой передачи внешнего зацепления. ЛИН им М.И. Калинина, 1975
3.Черная Л.А., Черный Б.А. Исследование рычажных механизмов с применением ЭВМ. Методические указания к курсовому проекту проектирования по теории механизмов и машин. ХПИ, 1979
Похожие работы

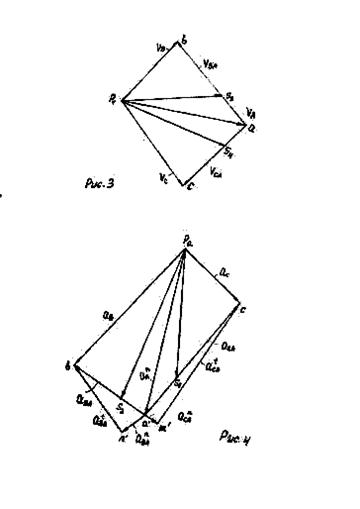
... отрезка "ав". Соединив точки S2 и S4 с полюсом плана скоростей получим векторы скоростей этих точек, а величина скоростей определится из соотношений: . Построенный план скоростей для механизма компрессора позволяет определить угловые скорости звеньев 2 и 4 в их вращательном движении. Как уже говорилось, отрезок плана скоростей ав (вектор) обозначает скорость точки "В" относительно точки ...
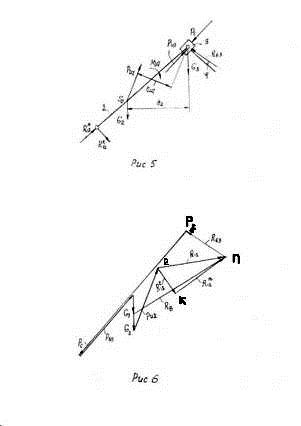
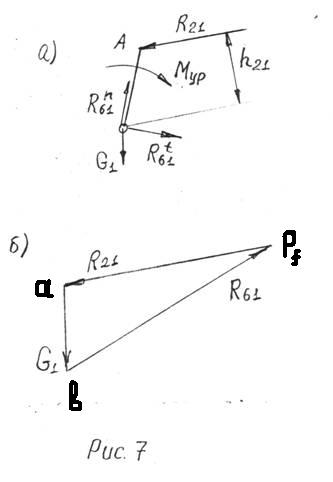
... B[44] = 220.000 TETA[44] = 0.0 R[45] = 52.000 B[45] = 220.000 TETA[45] = 0.0 R[46] = 52.000 B[46] = 360.000 TETA[46] = 0.0 6. Силовое исследование рычажного механизма. 6.1 Задачи силового исследования. При силовом исследовании решаются следующие задачи Определение сил действующих на звенья механизма. Определение реакций в кинематических ...
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... , - масса маховика, кг - плотность материала, (материал-Сталь 45) - ширина маховика, м - диаметр маховика, м ,м (2,23) где, - коэффициент (0,1÷0,3), м м кг 3. Силовой анализ рычажного механизма 3.1 Построение плана скоростей для расчётного положения Расчётным положением является положение №11. Построение плана скоростей описано в разделе №2. ...
0 комментариев