Навигация
3. Отделение решений
Задача отделения решений систем нелинейных уравнений состоит в определении достаточно малой окрестности (шара малого радиуса, центром которого является решение) около какого-нибудь одного решения и в выборе в этой окрестности начального приближения к решению. Начальное приближение должно попасть при этом в область сходимости метода.
Задача отделения решений не имеет достаточно эффективных методов общего характера. При решении уравнения предполагается знание начальных приближений к изолированному решению из постановки конкретной задачи. Если же таких данных нет, то можно дать лишь некоторые рекомендации для конкретных видов уравнений.
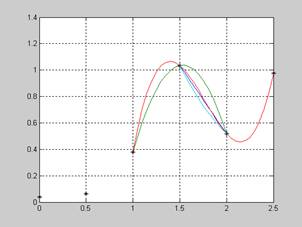
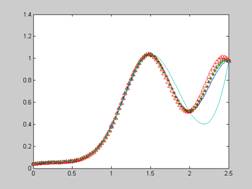
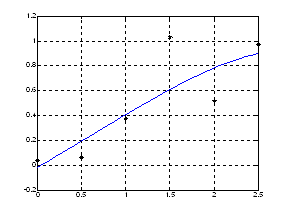
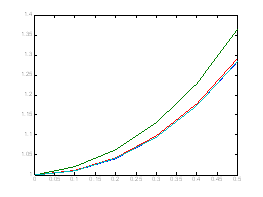
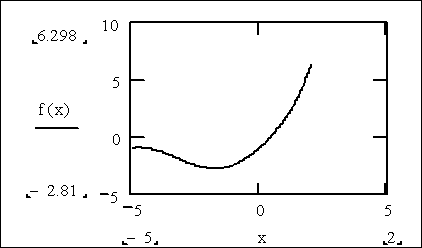
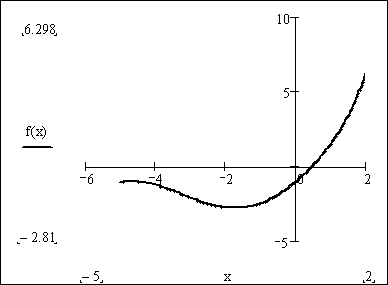
Так, если дано скалярное уравнение ![]() , то его решение с геометрической точки зрения можно рассматривать как абсциссы точек пересечения графика функции с осью абсцисс. Построив график функции y=f (x), приближенно определяем окрестности изолированных точек пересечения графика с горизонтальной осью. Сами точки пересечения берем за начальные приближения к точным решениям.
, то его решение с геометрической точки зрения можно рассматривать как абсциссы точек пересечения графика функции с осью абсцисс. Построив график функции y=f (x), приближенно определяем окрестности изолированных точек пересечения графика с горизонтальной осью. Сами точки пересечения берем за начальные приближения к точным решениям.
Безусловно, графические построения имеют большие погрешности, и выбранные начальные приближения могут не попасть в область сходимости применяемого метода.
Тогда нужно провести пробные решения на ЭВМ выбранным методом с исследованием сходимости.
Если приближения сходятся, то начальные приближения выбраны в области сходимости метода и можно получить приближенное решение с заданной точностью.
Если приближения расходятся, следует провести более точные графические построения и выбрать начальное приближение в области сходимости.
Аналогично отделяются решения для системы двух нелинейных уравнений
 ,
, ![]() .
.
В этом случае на плоскости x,y строятся линии уровня функции двух переменных ![]() и
и ![]() . Координаты точек пересечения графиков этих функций дают начальные приближения изолированных решений.
. Координаты точек пересечения графиков этих функций дают начальные приближения изолированных решений.
4. Методы решения нелинейных уравнений
4.1 Метод простой итерации
Метод простой итерации (см. [1]) применяется для решения систем нелинейных уравнений с любым числом уравнений. Его можно применять как для уточнения найденного решения, так и для первоначального нахождения решения. В последнем случае, однако, метод может не дать результата.
Для применения метода простой итерации система уравнений (2) приводится к виду (3).
Затем, взяв начальное приближение ![]() , которое предполагается либо известным, либо произвольным, строим последовательность
, которое предполагается либо известным, либо произвольным, строим последовательность
 (4)
(4)
по следующим формулам
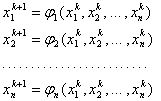 (5)
(5)
Замечание. Для приведения системы уравнений (2) к виду (3) можно использовать прием:
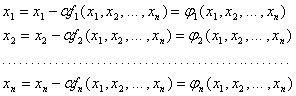
где ![]() – релаксационный параметр, определяется методом Зейделя.
– релаксационный параметр, определяется методом Зейделя.
4.2 Метод Зейделя
Метод Зейделя отличается от метода простой итерации тем, что вычисления ведутся по формулам:
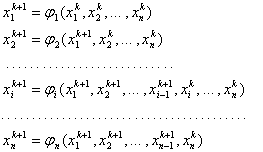 (6)
(6)
Иными словами, при вычислении ![]() используются не
используются не ![]() , как в методе простой итерации, а
, как в методе простой итерации, а ![]() .
.
4.3 Метод Ньютона
Этот метод (см.[1], [4]) предложен И.Ньютоном в 1669 году, однако наиболее полное обоснование было сделано советским математиком Л.В.Канторовичем в 1949 году (см.[4]), поэтому в литературе этот метод часто называют методом Ньютона-Канторовича.
Метод Ньютона является одним из итерационных методов, получаемых линеаризацией линейного оператора
![]() ,
,
где ![]() из уравнения (2).
из уравнения (2).
Так, для к-го приближения ![]() к точному решению
к точному решению ![]() уравнения (2) ставится в соответствие линеаризованное уравнение вида (2
уравнения (2) ставится в соответствие линеаризованное уравнение вида (2![]() ), а именно:
), а именно:
или ![]() ,
,
где ![]() – квадратная матрица Якоби, составленная из частных производных первого порядка функций,
– квадратная матрица Якоби, составленная из частных производных первого порядка функций, ![]() т.е.
т.е. ![]() , вычисленных в точке
, вычисленных в точке ![]() .
.
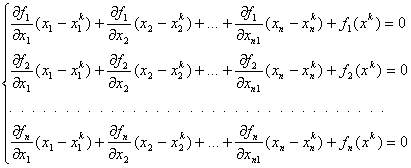
Таким образом, последовательность (4) строится по следующим правилам:
![]() (),
(),
где ![]() – обратный оператор к линейному оператору
– обратный оператор к линейному оператору ![]() , определяемому квадратной матрицей
, определяемому квадратной матрицей
![]()
Трудности построения алгоритма метода Ньютона, связанные с обращением производной ![]() (построение
(построение ![]() ), обычно преодолеваются тем, что вместо методов обращения матрицы
), обычно преодолеваются тем, что вместо методов обращения матрицы ![]() решают алгебраическую систему уравнений (7) относительно неизвестных
решают алгебраическую систему уравнений (7) относительно неизвестных ![]() . Алгоритмы решения системы линейных алгебраических уравнений хорошо отработаны, для них имеются стандартные программы для ЭВМ и, кроме того, в результате решения системы одновременно с обращением матрицы получается умножение обратной матрицы на вектор
. Алгоритмы решения системы линейных алгебраических уравнений хорошо отработаны, для них имеются стандартные программы для ЭВМ и, кроме того, в результате решения системы одновременно с обращением матрицы получается умножение обратной матрицы на вектор ![]() .
.
Итерационная формула метода Ньютона при таком подходе будет иметь вид:
![]() (7)
(7)
![]() . (8)
. (8)
4.4 Модифицированный метод Ньютона
Эта разновидность метода Ньютона строится путем определения производной только в одной точке приближенного решения, т. е. Последовательные приближения (4) строятся по формулам:
![]() , (9)
, (9)
где ![]() – начальное приближение к точному решению
– начальное приближение к точному решению ![]() .
.
Похожие работы

... 1250 61.1875 T2 = 3.9122 3.8196 6.4565 coef2 = 1.0178 -0.4243 0.0718 coef2 = 0.0718 -0.4243 1.0178 delt2 = 0.1199 delt2 = 0.0719 Численные методы решения задачи Коши для обыкновенных дифференциальных уравнений Эйлера явная function dy=func(x,y) dy=2*x*y clear X=[0.00000 0.10000 0.20000 0.30000 0.40000 0.50000]; Y=exp((X).^2); Y0=input('Значение функции в точке 0 = '); ...
... с помощью рекурентных соотношений? 104) Приведите конечно-разностные выражения для первой производной. 105) Подынтегральная функция y = f(x) задана таблицейВзяв h = 0,3, вычислить интеграл на отрезке [0,3; 0,9] методом Симпсона. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету ЧИСЛЕННЫЕ МЕТОДЫ Билет № 22 106) Как ...
... быть перечислены через запятую). Всякое уравнение с одним неизвестным может быть записано в виде, f(x)=0, где f(x) – нелинейная функция. Решение таких уравнений заключается в нахождении корней, т.е. тех значений неизвестного x, которые обращают уравнение в тождество. Точное решение нелинейного уравнения далеко не всегда возможно. На практике часто нет необходимости в точном решении уравнения. ...
... - функции f. Дальше, имеем: . Отсюда , где W'(x) - транспонированная матрица Якоби. Поэтому окончательно , причем . 3. Программная реализация итерационных методов Реализация алгоритмов итерационных методов решения систем нелинейных уравнений будет показана на примере системы: 3.1 Метод простых итераций Приведём систему к виду: Проверим условие ...
0 комментариев