Навигация
Метод Зейделя на основе линеаризованного уравнения
17411
знаков
0
таблиц
7
изображений
4.5 Метод Зейделя на основе линеаризованного уравнения
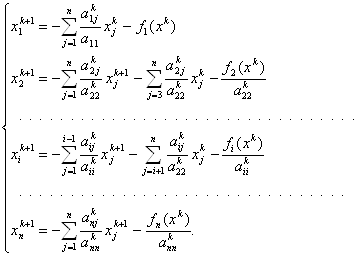
Итерационная формула для построения приближенного решения нелинейного уравнения (2) на основе линеаризованного уравнения (7) имеет вид:
4.6 Метод наискорейшего спуска
Методы спуска (см. [2]) сводят решение системы (2) к задаче нахождения минимума специально построенного функционала (функционал – отображение ![]() в R), а именно:
в R), а именно:
![]() ,
,
где ![]() .
.
Функционал в конечном пространстве Rn можно рассматривать как функцию многих переменных ![]() .
.
Для нахождения точки ![]() , в которой функционал f принимает минимальное нулевое значение, выбирают точку
, в которой функционал f принимает минимальное нулевое значение, выбирают точку ![]() , находят
, находят ![]() и строят итерационную формулу:
и строят итерационную формулу: ![]() с начальным приближением
с начальным приближением ![]() .
.
В итерационной формуле параметр hk пока не определен, выберем его таким образом, чтобы выполнилось условие: ![]() , начиная с x0, в предположении, что f – монотонный функционал.
, начиная с x0, в предположении, что f – монотонный функционал.
Для выбора hk построим функционал, зависящий от параметра, который изменяется непрерывно: ![]() .
.
При h=0 имеем, что f (0) – линия уровня функционала, проходящая через точку xk . Для нахождения следующей линии уровня, более близкой к минимуму, будем выбирать h таким образом, чтобы для данного xk
![]()
Это условие минимума по h будем рассматривать как уравнение для получения hk.
Решим его приближенно, т.к. ошибка в несколько процентов обычно не влияет на скорость сходимости. Отметим кстати, что число hkвсегдадолжно быть положительным. Для этого разложим функцию ![]() в ряд Тейлора по h в точке h=0 и возьмем только линейную часть этого разложения
в ряд Тейлора по h в точке h=0 и возьмем только линейную часть этого разложения
![]() .
.
Подстановка линейной части в условие ![]() , дает уравнение для приближенного определения
, дает уравнение для приближенного определения
![]() .
.
Решая построенное уравнение относительно h, получим:
![]() или
или 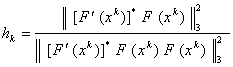 .
.
Таким образом, итерационная формула метода наискорейшего спуска имеет вид:
![]() или
или ![]() , где производные
, где производные ![]() вычислены в точке
вычислены в точке ![]() .
.
Метод наискорейшего спуска требует большего количества вычислений, чем другие методы первого порядка. Однако он обладает по сравнению с другими методами важным преимуществом, заключающемся в неизбежной сходимости процесса. При этом нужно помнить, что метод наискорейшего спуска может привести не к решению системы уравнений (2), а к значениям аргумента, дающим относительный экстремум функции
![]() , т.е.
, т.е. ![]() .
.
5. Сходимость методов решения нелинейных уравнений
Если метод сходится, то есть ![]() , где
, где
![]() – точное решение
– точное решение
![]() – k-тое приближение к точному решению, то итерационный процесс следовало бы закончить по достижению заданной погрешности
– k-тое приближение к точному решению, то итерационный процесс следовало бы закончить по достижению заданной погрешности ![]() , где e – заданная точность (погрешность).
, где e – заданная точность (погрешность).
Однако практически это условие выполнить нельзя, так как ![]() неизвестно, тогда для окончания итерационного процесса можно воспользоваться неравенствами
неизвестно, тогда для окончания итерационного процесса можно воспользоваться неравенствами ![]() , или
, или ![]() , где
, где ![]() и
и ![]() – заданные величины.
– заданные величины.
При таком окончании итераций погрешность может возрасти по сравнению с ![]() и, поэтому, чтобы не увеличивалась, величины
и, поэтому, чтобы не увеличивалась, величины ![]() и
и ![]() соответственно уменьшают или увеличивают число итераций.
соответственно уменьшают или увеличивают число итераций.
Методы простой итерации, Зейделя, модифицированный метод Ньютона, метод наискорейшего спуска (см. [1], [2], [3], [4]) являются методами первого порядка – это значит, что имеет место неравенство ![]() , k=1, 2, . . . , где
, k=1, 2, . . . , где ![]() – константа, своя у каждого метода, зависящая от выбора начального приближения
– константа, своя у каждого метода, зависящая от выбора начального приближения ![]() , функции fi, i = 1, 2, . . . , n, и их частных производных первого и второго порядков – точнее их оценок в некоторой окрестности искомого решения, которой принадлежит начальное приближение.
, функции fi, i = 1, 2, . . . , n, и их частных производных первого и второго порядков – точнее их оценок в некоторой окрестности искомого решения, которой принадлежит начальное приближение.
Метод Ньютона является методом второго порядка, то есть для него имеет место неравенство ![]() , k=1, 2, . . . , где
, k=1, 2, . . . , где ![]() – константа, зависящая от тех же величин, что и константа
– константа, зависящая от тех же величин, что и константа ![]() .
.
А теперь рассмотрим достаточные условия сходимости метода простой итерации и метода Ньютона.
Сходимость процесса простой итерации зависит от двух условий. Первое условие состоит в том, что какая-нибудь точка ![]() должна оказаться близкой к исходному решению
должна оказаться близкой к исходному решению ![]() . Степень необходимой близости зависит от функций j1, j2, . . . , jn . Это требование не относится к системам линейных уравнений, для которых сходимость процесса простой итерации зависит только от второго условия.
. Степень необходимой близости зависит от функций j1, j2, . . . , jn . Это требование не относится к системам линейных уравнений, для которых сходимость процесса простой итерации зависит только от второго условия.
Второе условие связано с матрицей, составленной из частных производных первого порядка функций j1, j2, . . . , jn– матрицей Якоби
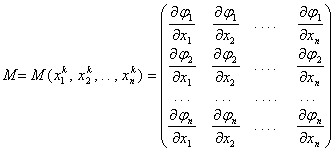 ,
,
вычисленных в точке ![]() .
.
В случае, когда рассматривается система линейных алгебраических уравнений, матрица M состоит из постоянных чисел – коэффициентов, стоящих при неизвестных в правой части уравнения (3). В случае нелинейных уравнений элементы ![]() матрицы M зависят, вообще говоря, от
матрицы M зависят, вообще говоря, от ![]() . Для сходимости процесса простой итерации достаточно, чтобы выполнялось неравенство:
. Для сходимости процесса простой итерации достаточно, чтобы выполнялось неравенство: ![]() для
для ![]() из некоторой окрестности точного решения
из некоторой окрестности точного решения ![]() , которой должно принадлежать начальное приближение
, которой должно принадлежать начальное приближение ![]() .
.
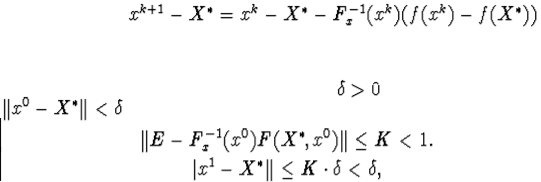
Приведем также достаточные условия сходимости метода Ньютона для системы уравнений вида (2) по норме ![]() .
.
Предположим, что имеется начальное приближение ![]() к искомому решению системы (2)
к искомому решению системы (2) ![]() , функции
, функции ![]() непрерывны и имеют непрерывные частные производные до второго порядка в шаре
непрерывны и имеют непрерывные частные производные до второго порядка в шаре ![]() , тогда, если выполнены условия:
, тогда, если выполнены условия:
1) Матрица Якоби ![]() системы (2) на начальном приближении имеет обратную
системы (2) на начальном приближении имеет обратную ![]() и известна оценка нормы обратной матрицы
и известна оценка нормы обратной матрицы ![]() ,
,
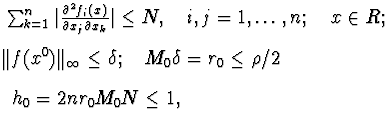
2) Для всех точек шара ![]() выполнено неравенство
выполнено неравенство
 при i, j = 1, 2, . . . , n ,
при i, j = 1, 2, . . . , n ,
3) Выполнено неравенство
![]() ,
,
где L – постоянная 0 £ L £ 1,
4) Числа b, N, r подчинены условию a = nbNr < 0,4, тогда система уравнений (2) в шаре ![]() имеет единственное решение, к которому сходятся последовательные приближения (8) или (7’), (9’).
имеет единственное решение, к которому сходятся последовательные приближения (8) или (7’), (9’).
Для других методов условия сходимости имеют сложный вид, и мы отсылаем читателя к специальной литературе [1], [2], [3], [4].
6. Примерный перечень возможных исследований
1) Сравнение различных методов на экономичность при решении конкретной задачи:
· по числу операций на одной итерации;
· по числу итераций, необходимых для достижения заданной точности;
2) Зависимость числа итераций для достижения заданной точности:
· от выбора вида нормы;
· от выбора критерия окончания итерационного процесса по ![]() или по невязке
или по невязке ![]() ;
;
· от выбора начального приближения;
· от погрешности задания коэффициентов в уравнении.
7. Контрольные вопросы
1) Понятие о нелинейных системах уравнений в Rn.
2) Понятие приближенного и точного решения нелинейной системы уравнений.
3) Сущность графического метода отделения решения для системы двух нелинейных уравнений, каковы его преимущества и недостатки?
4) Сущность метода простой итерации и метода Зейделя. Каковы условия применимости метода простой итерации?
5) Сущность метода Ньютона и его модификации. Какова скорость сходимости метода Ньютона?
6) Сущность метода наискорейшего спуска. Как выбирается параметр спуска?
8. Порядок выполнения курсовой работы
1) Получить вариант задания, индивидуальный для каждого студента, у преподавателя, а именно:
Найти решение системы нелинейных уравнений в первой координатной четверти с номером – N1 (см. варианты заданий п.10), применив для первого этапа уточнения метод с номером – N2, а для второго этапа уточнения метод с номером – N3 , точность вычислений на первом этапе – EPS1Î[0.1 – 0.01], на втором этапе – EPS2 Î [0.1 - 0.0001], N4 – номер нормы, I – номер параметра a, J – номер параметра b, начальное приближение выбрать произвольно или графически, aÎ(0,1).
2) Разработать обязательные для выполнения задания разделы данных методических указаний.
Похожие работы

... 1250 61.1875 T2 = 3.9122 3.8196 6.4565 coef2 = 1.0178 -0.4243 0.0718 coef2 = 0.0718 -0.4243 1.0178 delt2 = 0.1199 delt2 = 0.0719 Численные методы решения задачи Коши для обыкновенных дифференциальных уравнений Эйлера явная function dy=func(x,y) dy=2*x*y clear X=[0.00000 0.10000 0.20000 0.30000 0.40000 0.50000]; Y=exp((X).^2); Y0=input('Значение функции в точке 0 = '); ...
... с помощью рекурентных соотношений? 104) Приведите конечно-разностные выражения для первой производной. 105) Подынтегральная функция y = f(x) задана таблицейВзяв h = 0,3, вычислить интеграл на отрезке [0,3; 0,9] методом Симпсона. Зав. кафедрой -------------------------------------------------- Экзаменационный билет по предмету ЧИСЛЕННЫЕ МЕТОДЫ Билет № 22 106) Как ...
... быть перечислены через запятую). Всякое уравнение с одним неизвестным может быть записано в виде, f(x)=0, где f(x) – нелинейная функция. Решение таких уравнений заключается в нахождении корней, т.е. тех значений неизвестного x, которые обращают уравнение в тождество. Точное решение нелинейного уравнения далеко не всегда возможно. На практике часто нет необходимости в точном решении уравнения. ...
... - функции f. Дальше, имеем: . Отсюда , где W'(x) - транспонированная матрица Якоби. Поэтому окончательно , причем . 3. Программная реализация итерационных методов Реализация алгоритмов итерационных методов решения систем нелинейных уравнений будет показана на примере системы: 3.1 Метод простых итераций Приведём систему к виду: Проверим условие ...
0 комментариев