Навигация
Построение кривой скорости движения поезда V(S) способом МПС
28889
знаков
14
таблиц
0
изображений
6.2 Построение кривой скорости движения поезда V(S) способом МПС
Для построения кривой скорости необходима диаграмма f(V), построенная на миллиметровой бумаге. Масштабы пути, скорости движения и силы увязываются между собой.
Для получения очередного отрезка кривой V(S) необходимо выполнить следующее:
а) выбрать режим ведения поезда;
б) при уклоне i≠0 перенести начало координат на диаграмме f(V) в точку на оси, где f=i;
в) определить знак силы f при начальной скорости (при новом положении начала координат). Знак силы определяет знак приращения скорости движения ∆V;
г) определить абсолютную величину приращения скорости ∆V, среднюю скорость движения Vcp и очередное значение скорости движения Vn+1 по выражениям:
Vср =Vn +∆V/2 , (6.3)
Vn+1 =Vn+∆V, (6.4)
д) при определении ∆V необходимо чтобы соблюдались условия:
|∆V|≤∆Vmax, (6.5)
Vn+1 ≤Vдоп, (6.6)
где ∆Vmax — максимально допустимое приращение скорости движения. Согласно ПТР ∆V = 5... 1 0 км/ч
— допустимая скорость движения на рассматриваемом элементе профиля пути.
Кроме того, необходимо следить, чтобы точки излома кривой f(V) и значение установившейся скорости движения не попадали внутрь интервала ∆V
е) на кривой f(V) для выбранного режима ведения поезда находим точку. соответствующую скорости Vср , и из этой точки проводим луч в начало координат;
ж) на графике V(S), ось скорости которого должна быть параллельна оси V на диаграмме f(V) через начальную точку кривой скорости V провести в пределах ∆V отрезок прямой, перпендикулярный полученному лучу на диаграмме f(V). Конец этого отрезка принимаем за начальную точку скорости движения на следующем отрезке пути. При подходе к перелому профиля пути чаще всего последняя точка, построенная для данного элемента, попадает на следующий элемент с другим уклоном. В этом случае отрезок кривой скорости проводят только до границы элемента, и точка пересечения с границей элемента принимается за начальную точку кривой скорости на следующем элементе профиля пути.
Далее необходимо перейти к пункту а) и повторить рассмотренные действия.
На кривой скорости в местах изменения условий ведения поезда делаем отметки необходимые для дальнейшего построения кривых тока.
Кривую скорости строят для двух вариантов движения с остановкой на промежуточной станции и без остановки).
6.3 Выбор режима ведения поезда
Для исключения неопределенности при выборе режима ведения поезда выбираем условия, соблюдение которых дает однозначное решен задачи. Такими условиями могут быть: получение наименьшего времени хода; получение наименьшего расхода электроэнергии при соблюдении данного времени хода; получение наименьших эксплуатационных затрат и многое другое.
Если каждый элемент профиля пути будет проследован с наименьшим временем, то и общее время хода будет минимальным.
Для получения наибольшей средней скорости требуется наибольшая результирующая сила, которая получается в тяговом режиме с наибольшими тяговыми усилиями (с учетом действующих ограничений силы тяги).
При одном и том же ускорении средняя скорость тем больше, чем больше начальная скорость.
Скорость движения поезда ограничена конструкцией пути, вагонов и локомотива и при тяговом режиме может достичь допустимого значения, В этом случае для обеспечения наименьшего времени хода движение поезда до конца элемента должно осуществляться с допустимой скоростью. Режим ведения поезда
с постоянной скоростью определяется из условия равенства нулю результирующей силы при этой скорости. Однако часто ни в одном из режимов это условие не выполняется, и тогда за счет чередования режимов скорость движения поддерживается около допустимого значения.
Движение с возможной наибольшей силой тяги до конца элемента профиля пути, или до точки пути, где скорость достигает максимального значения, дальнейшее движение со скоростью, близкой к допустимой, обеспечивает наибольшую скорость в конце рассматриваемого элемента профиля пути. Тем самым создаётся условие для получения наименьшего времени хода на следующем элементе.
6.4 Построение кривой t(S) способом МПС
Построение кривой t(S) начинаем с выбора масштаба времени mi и полюсного расстояния ∆. При построении кривой скорости были выбраны масштабы скорости движения и пути. Этим масштабам соответствии mi=10 мм/мин и ∆=30 мм. Кривую времени строю на одном графике с кривой скорости.
В результате выполненных построений, получаем время хода поезда с остановкой и без остановки.
Похожие работы
... 132 54 302 610 7550 11830 Российский Государственный Открытый Технический Университет Путей Сообщения. Курсовая работа по дисциплине «Электрические железные дороги» на тему: «Анализ работы системы управления электровозом постоянного тока при разгоне грузового поезда.» Задание на курсовую работу : Предлагается выполнить анализ работы системы управления электровозом ...
... рассчитываем для дороги Б, данные сводим в таблицу 4.1. Для дороги Б КFi =0,375 Список литературы. 1. А.П.Буйносов , Ю.А.Кириченко «Методическое руководство для выполнения курсовой работы по дисциплине «Эксплуатация и ремонт электроподвижного состава». Екатеринбург, 2001, 31с. 2. Тищенко «Справочник по электроподвижному составу, тепловозам и дизель-поездам» том 2, - М.: Транспорт, 1976г. ...
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
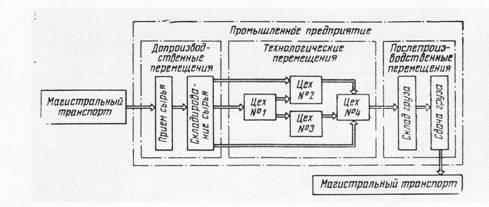
... со средой осуществляется с помощью внешнего промышленного транспорта через стыковые пункты. Следовательно, состав всей транспортной системы можно представить совокупностью трех подсистем со свойственными им конструктивными особенностями: внешнего промышленного транспорта, транспортных магистралей и пунктов их стыкования. Под пунктом стыкования понимают подсистему транспорта как комплекс ...
0 комментариев