Навигация
5.1 Определение усилий
Усилия в зацеплениях представляются в виде трёх составляющих: окружной P, радиальной T и осевой (аксиальной) Q. Окружное усилие P направлено по касательной к делительной окружности по направлению движения для ведомого колеса и против движения для ведущего колеса; радиальное усилие T направлено к центру колеса, осевое Q - вдоль оси.
Усилия в зубчатых передачах вычисляются по формулам:
Цилиндрическая прямозубая передача.
Окружное усилие.
 (19)
(19)
Радиальное усилие.
![]() (20)
(20)
где α - угол зацепления, для эвольвентных зубчатых колёс α = 200.
Используя формулы (22) и (23), получаем следующие значения.
Окружное и радиальное усилия, действующие на шестерню 5.
 Н
Н
![]() Н
Н
Окружное и радиальное усилия, действующие на колесо 4.
 Н
Н
![]() Н
Н
Окружное и радиальное усилия, действующие на колесо 6.
 Н
Н
![]() Н
Н
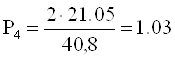
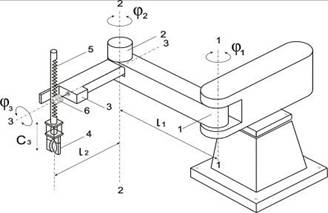
5.2 Компоновочная схема
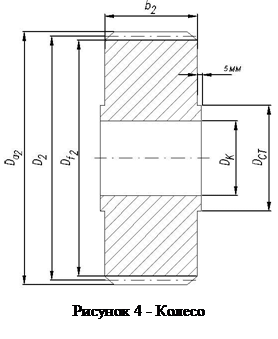
Компоновочная схема редуктора, с усилиями в зацеплениях колёс, представлена на рис. 4.
Она представляет собой эскизный упрощённый вариант конструкции.
Рисунок 4 - Компоновочная схема редуктора
5.3 Расчет длины вала
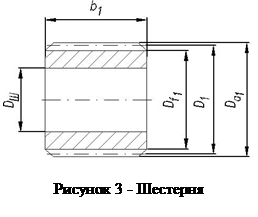
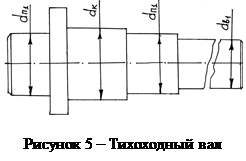
Зная размеры зубчатых колес, составляется эскизная компоновка механизма (рис. 5) и определяются необходимые размеры валов. Расстояние l1 между серединами левого и правого подшипника определяется по формуле
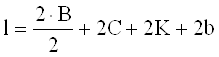
где Bn- ширина подшипника , мм.
С – зазор между стенкой корпуса и колеса, мм.
K – ширина ступицы, мм.
b – ширина зуба , мм.

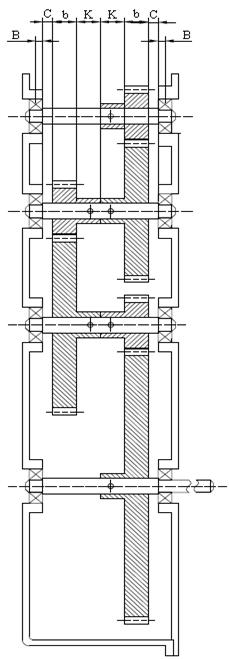
Рисунок 5 - Эскизная компоновка механизма
5.4 Расчёт диаметра предпоследнего вала 5.4.1 Расчётные схемы. Построение эпюр
Расчётная схема предпоследнего вала представлена на рис. 6.

Рисунок 6 - Усилия в зацеплениях колёс предпоследнего вала
Рассмотрим плоский изгиб в плоскости YOZ (рис. 7).
Где ![]() - длина вала, a1= 7 мм , a2= 7.5 мм , a3=22.5 мм ,
- длина вала, a1= 7 мм , a2= 7.5 мм , a3=22.5 мм ,
![]()

Рисунок 7 - Усилия, действующие в плоскости YOZ
Для этого определим реакции в опорах из условий равновесия:
![]()
RB= 0.9 Н
![]()
RА = -0.08 Н
Проверка:
![]()
![]()
-0,08 + 0.9 – 1.11 + 0.37 = 0
Изгибающие моменты на участках zi даны в таблице 1.
Таблица 1 - Изгибающие моменты в плоскости YOZ.
| 0 ≤ x1 ≤ a1 | a1 ≤ x2 ≤ a1+a2 | 0 ≤ x3 ≤ a3 |
| M1 = RA. x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = -0.08 . 7 = -0.56 Н.мм | M2 = RA. x2 + T4. (x2 - a1) x2 = a1 , M2 = -0.56 Н.мм x2 = a1+a2 , M2 = -2.36+8.325 = 5.96 Н.мм | M3 = RB. x3 x3 = 0 , M3 = 0 x3 = a3 , M3 = 0.9 . 7.5 = 6 Н.мм |
Эпюра МХ представлена на рис.

Рисунок 8 - Эпюра МХ
Рассмотрим плоский изгиб в плоскости XOZ (рис. 9).

Рисунок 9 - Усилия, действующие в плоскости XOZ
Определим реакции в опорах из условий равновесия:
![]()
RB= 1.07 Н
![]()
RА = 0.59 Н
Проверка
![]()
![]()
0.59+1.07-0.37-1.11 = 0
Изгибающие моменты на участках zi даны в таблице 2.
Таблица 2 - Изгибающие моменты в плоскости XOZ.
| 0 ≤ x1 ≤ a1 | a1 ≤ x2 ≤ a1+a2 | 0 ≤ x3 ≤ a3 |
| M1 = RA. x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 0.59 . 7= 4.13 Н.мм | M2 = RA. x2 - P4. (x2 - a1) x2 = a1 , M2 = 4.13 Н.мм x2 = a1+a2 , M2 = 0.59 . 29.5-0.37 . 22.5 = 9 Н.мм | M3 = RB. x3 x3 = 0 , M3 = 0 x3 = a3 , M3 = 1.07 . 7.5 = 9 Н.мм |
Эпюра МY представлена на рис. 10.
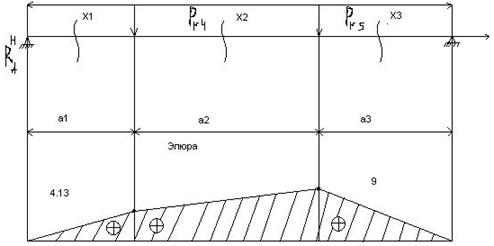
Рисунок 10 - Эпюра МY
5.4.2 Расчёт диаметра валаДиаметр вала определяется из рассмотрения условий прочности.
Наибольшие изгибающие моменты Мхмах = 6 Н.мм , Мумах = 9 Н.мм.
Условие прочности для вала представляется в виде:
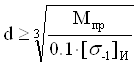 (22)
(22)
где Мпр - приведённый момент, определяемый по формуле:
![]() (23)
(23)
МХ, МY, - изгибающие моменты в опасном сечении в двух перпендикулярных плоскостях;
[σ-1]и - предел выносливости при симметричном цикле (для Ст45 [σ-1]и = 8000 Н/см2).
Таким образом:
![]() Н. см
Н. см
 мм
мм
Округляем полученное значение до ближайшего большего значения по ГОСТ 6366-90.
d = 1.6 мм.
5.5 Расчёт диаметра выходного вала 5.5.1 Расчётные схемы. Построение эпюрРасчётная схема выходного вала представлена на рис. 11.

Рисунок 11 - Усилия в зацеплении колеса выходного вала
Рассмотрим плоский изгиб в плоскости YOZ (рис. 12).
Где ![]() - длина вала,
- длина вала, ![]() ,
, ![]() .
.
![]()
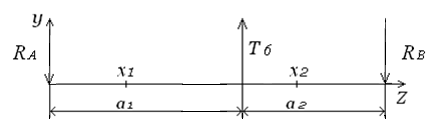
Рисунок 12 - Усилие, действующее в плоскости YOZ
Определим реакции в опорах из условий равновесия:
![]()
![]() Н
Н
![]()
![]() Н
Н
Проверка
![]()
![]()
-0.8+1.05-0.24=0
Изгибающие моменты на участках zi даны в таблице 3.
Таблица 3 - Изгибающие моменты в плоскости YOZ
| 0 ≤ X1 ≤ a1 | 0 ≤ X2 ≤ a2 |
| M1 = RA. x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 25.5 . (-0.24) = -6 Н.мм | M2 = RB. x2 x2 = 0 , M3 = 0 x2 = a2 , M2 = 7.5 . (0.8)= -6 Н.мм |
Эпюра МХ показана на рис. 13.
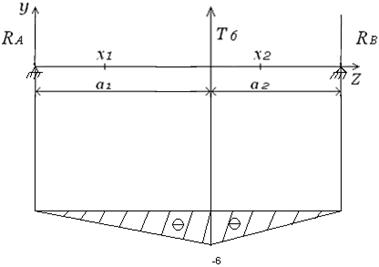
Рисунок 13 - Эпюра МХ
Рассмотрим плоский изгиб в плоскости XOZ (рис. 14)
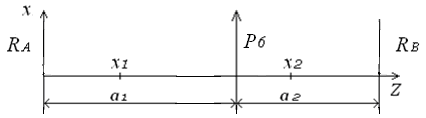
Рисунок 14 Усилие, действующее в плоскости XOZ.
Определим реакции в опорах из условий равновесия:
![]()
![]() Н
Н
![]()
![]() Н
Н
Проверка
![]()
![]()
-1.05+0.72+0.3=0
Изгибающие моменты на участках zi даны в таблице 4.
Таблица 4 - Изгибающие моменты в плоскости XOZ
| 0 ≤ X1 ≤ a1 | 0 ≤ X2 ≤ a2 |
| M1 = RA. x1 x1 = 0 , M1 = 0 x1 = a1 , M1 = 0.3 . 5.5 = 6 Н.мм | M2 = RB. x2 x2 = 0 , M3 = 0 x2 = a2 , M2 = 7.5 . 0.72 = 6 Н.мм |
Эпюра МY показана на рис. 15.
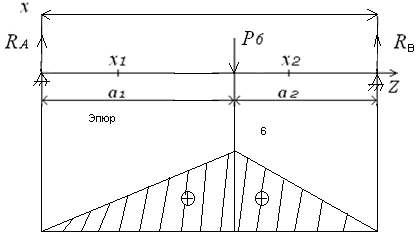
Рисунок 15 - Эпюра МY
5.5.2 Расчёт диаметра выходного валаНаибольшие изгибающие моменты Мхмах = 6 Н.мм , Мумах = 0 Н.мм.
Таким образом, используя формулы (22) и (23), получаем
![]() Н. см
Н. см
 мм
мм
Округляем полученное значение до ближайшего большего значения по ГОСТ 6366-90.
d = 3 мм.
6 Расчёт и выбор подшипника 6.1 Выбор подшипника
Выбор типа подшипника зависит от отношения осевой силы FAрадиальной Fr. В разрабатываемом редукторе присутствуют только прямозубые зубчатые колеса следовательно выбираются радиальные шарикоподшипники , так как

На основе полученного значения диаметра выходного вала (d = 3 мм), выбираем подшипник радиальный 1 000 092, параметры которого приведены в таблице 5 и таблице 6.
Таблица 5 - Параметры шарикоподшипника радиального однорядного 1 000 094 ГОСТ 8338-57
| Размеры, мм | Шарики | |||
| d | D | B | Dw, мм | Z |
| 3 | 8 | 3 | 1.59 | 6 |
Таблица 6 - Ориентировочные расчётные параметры
| Грузоподьёмность, Н | |
| Динамическая (С) | Статическая (С0) |
| 440 | 200 |
Размеры подшипника обозначены на рис. 16.
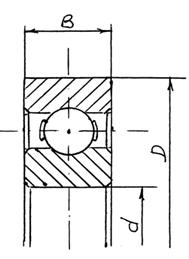
Рисунок 16 - Размеры подшипника 1 000 092
6.2 Расчёт подшипника на долговечностьТеоретическая расчётная долговечность L в млн. оборотов определяется по формуле
 (24)
(24)
где С - динамическая грузоподъёмность подшипника;
Р - эквивалентная динамическая нагрузка определяется по эмпирическим формулам и зависит от действующих на подшипник сил, характера нагрузки и температуры.
Долговечность подшипника в часах
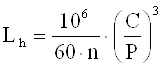 (25)
(25)
где n - частота вращения кольца подшипника в минуту (nвых'). Для приборных зубчатых редукторов ресурс работы подшипников устанавливаеться в пределах 1000-10000 ч.
Эквивалентная динамическая нагрузка Р для однорядных радиальных и радиально-упорных шарикоподшипников
![]() (26)
(26)
где Кδ - коэффициент, учитывающий влияние динамических условий работы (Кδ = 1);
КТ - коэффициент, учитывающий влияние температурного режима работы на долговечность подшипника (КТ = 1);
ν - коэффициент, учитывающий какое кольцо вращается; при вращении внутреннего кольца ν = 1; наружного кольца ν = 1.2 (кроме радиального шарикового сферического, радиально-упорного шарикового магнитного, для которых в любом случае ν = 1);
X и Y - коэффициенты радиальной и осевой нагрузок соответственно, назначаемые в зависимости от параметра осевой нагрузки (при отсутствии осевой нагрузки - X = 1, Y = 0).
Fr - радиальная нагрузка;
Fa - осевая нагрузка
Радиальная нагрузка определяется, как наибольшая величина, полученная из следующих уравнений
![]() (27)
(27)
![]() (28)
(28)
Где RA, RB, RA, RB - реакции опор в обоих подшипниках одного вала, разложенные по осям. Эквивалентная статическая нагрузка P0 для радиальных, радиально-упорных шарикоподшипников выбирается как наибольшая величина, полученная из уравнений.
Используя формулы (27) и (28), получим следующие значения радиальных нагрузок на подшипниках выходного вала
![]() Н
Н
![]() Н
Н
Поскольку ![]() , то
, то
Fr = Fr1 = 21.34 Н
Определим эквивалентную динамическую нагрузку по формуле (26)
![]() Н
Н
Пользуясь данными из таблицы 6 и формулами (24) и (25), получим номинальную долговечность
 млн.об.
млн.об.
или
 ч.
ч.
Похожие работы
... масштабе (на чертеже) равны: ; ; ; , здесь и далее величина в скобках обозначает размер в миллиметрах на чертеже. ПЛАН СКОРОСТЕЙ Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для точек звеньев механизма, начиная с ведущего звена, угловая скорость w1 которого задана. Находим численное значение скорости точки B из выражения: ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... , – статический момент нагрузки приведенного к валу двигателя, являющийся возмущающим воздействием (). Найдем передаточную функцию по структурной схеме (рис. 2.5) скорректированной системы управляемого привода. . . . . Таким образом, получили, что , значит, рассчитанный коэффициент передачи корректирующего устройства удовлетворяет требованиям к статической точности системы. Далее ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев