Навигация
Расчет элеметнов крепления
25394
знака
9
таблиц
16
изображений
7 Расчет элеметнов крепления
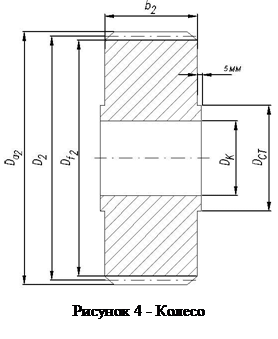
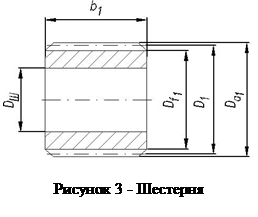
Крепление колес на валах осуществляется при помощи штифтов.
7.1 Расчет диаметра штифта
Диаметр штифта dш выбирается из ряда стандартных размеров при учете соотношения (10) и проверяются условия прочности на срез и на смятие

Диаметр штифта dш=1.6 мм, длина штифта l= 8мм ГОСТ 3128-70.
7.1.2 Расчёт на срез (29)
(29)
где М - крутящий момент на валу;
dв - диаметр вала;
z - число площадок среза;
[τ]ср –допускаемое напряжение среза ([τ]ср =150 Н/мм2).
Подставляя в формулу (29), получаем

Условия прочности на срез выполняется
7.1.3 Расчёт на смятие (30)
(30)
где h - толщина прикрепляемой детали;
[σ]см - допускаемое напряжение смятия ([σ]см = 173 Н/мм2).
Из формул (30) , получаем

Условия прочности на смятие выполняется.
8. Расчёт точности
В качестве показателя точности передачи принимается кинематическая погрешность и мертвый ход.
Алгоритм расчета точности разрабатывается исходя из задач исследования. В данной работе применяться алгоритм оценки наименьшей и возможной , погрешности передачи при заданных степенях точности, включающий в себя :
1. Расчет параметров передачи, необходимых для выбора показателей точности зубчатых колес и передач из таблиц стандартов.
- передаточного числа по формуле (5);
- делительных диаметров по формуле (13);
- межосевого расстояния
 , мм
, мм
где dш и dк –диаметр шестерни и колеса соответственно, мм.
2. Выбора необходимых показателей точности из таблиц стандартов по исходным данным параметрам, вычислениям.
3. Расчет минимальной кинематической погрешности по формуле
![]() , мкм (32)
, мкм (32)
 ,угл. мин. (33)
,угл. мин. (33)
где ![]() - коэффициент фазовой компенсации;
- коэффициент фазовой компенсации;
![]() - минимальная кинематическая погрешность.
- минимальная кинематическая погрешность.
![]() ,мкм (34)
,мкм (34)
![]() ,мкм. (35)
,мкм. (35)
где ![]() ,
,![]() - значение допуска для цилиндрических зубчатых колес ,мкм;
- значение допуска для цилиндрических зубчатых колес ,мкм;
![]() - значение допуска на кинематическую погрешность для зубчатой передачи, мкм.
- значение допуска на кинематическую погрешность для зубчатой передачи, мкм.
4. Расчет минимального мертвого хода по формуле
 , мкм. (36)
, мкм. (36)
 ,угл. мин. (37)
,угл. мин. (37)
где ![]() - угол зацепления (
- угол зацепления (![]() =20 для эвольвентного зацепления);
=20 для эвольвентного зацепления);
f min – параметр для цилиндрической передачи, мкм.
5. Расчет суммарной минимальной погрешности передачи по формуле
![]() , угл. мин. (38)
, угл. мин. (38)
Определение параметров передачи и выбор стандартов показателей точности сведены в таблицу 7.
Таблица 7 – Определение параметров передачи
| Зубчатая передача | U | d ,мм | aw, мм | Fp, мкм | fn min,мкм | ff, мкм | Ks | ||
| dш | dk | Fpш | Fpк | ||||||
| Z1 Z2 | 2.52 | 17 | 43 | 30 | 34 | 30 | 74 | 11 | 0,75 |
| Z3 Z4 | 3.23 | 17 | 55 | 36 | 34 | 35 | 74 | 11 | 0,75 |
| Z4 Z5 | 5 | 17 | 85 | 51 | 34 | 42 | 87 | 11 | 0,75 |
Результаты расчетов допусков на кинематическую погрешность и определение минимального мертвого хода сведены в таблицу 8.
Таблица 8 – Результаты расчетов определения погрешностей зубчатых передач
| Зубчатая передача | Fi’ , мкм | Fiio’ ,мкм | Δφ*min ,мкм | Δφmin ,угл.мин. | ΔС*min ,мкм | ΔCmin,угл.мин. | ΔСΣmin ,угл.мин. | |
| Fiш’ | Fiк’ | |||||||
| Z1 Z2 | 45 | 41 | 86 | 39.99 | 6.39 | 78.8 | 13.41 | 19.81 |
| Z3 Z4 | 45 | 46 | 91 | 42.31 | 5.29 | 78.8 | 10.48 | 15.78 |
| Z4 Z5 | 45 | 53 | 98 | 45.57 | 3.68 | 92.65 | 7.98 | 11.66 |
Значения полученные в результате вычислений суммарной погрешности зубчатых передач находятся в пределах заданных допустимых значений 30 угл.мин.
Похожие работы
... масштабе (на чертеже) равны: ; ; ; , здесь и далее величина в скобках обозначает размер в миллиметрах на чертеже. ПЛАН СКОРОСТЕЙ Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для точек звеньев механизма, начиная с ведущего звена, угловая скорость w1 которого задана. Находим численное значение скорости точки B из выражения: ...
... несчастных случаев. Рассмотрен вопрос о мероприятиях по защите окружающей среды. 7. Технико-экономическое обоснование проекта 7.1. Выбор и обоснование аналога В качестве аналога автоматизированной системы управления тепличным хозяйством выберем комплекс «АСУ «Теплица» ЗАО “НАНКО”, который реализует следующие основные функции: · регистрацию и отображение значений контролируемых ...
... , – статический момент нагрузки приведенного к валу двигателя, являющийся возмущающим воздействием (). Найдем передаточную функцию по структурной схеме (рис. 2.5) скорректированной системы управляемого привода. . . . . Таким образом, получили, что , значит, рассчитанный коэффициент передачи корректирующего устройства удовлетворяет требованиям к статической точности системы. Далее ...
... 2. Тип элементов, входящих в изделие и количество элементов данного типа; 3. Величины интенсивности отказов элементов , входящих в изделие. Все элементы схемы ячейки 3 БУ привода горизонтального канала наведения и стабилизации ОЭС сведены в табл. 13.1. Среднее время безотказной работы блока можно рассчитать по формуле: (13.5) где L - интенсивность отказов БУ следящего привода. ...
0 комментариев