Навигация
Расчет редуктора точного прибора
43940
знаков
3
таблицы
5
изображений
Аннотация
В курсовом проекте проведен расчет редуктора точного прибора, а именно, осуществлен выбор типа передач и вида зацепления, проведен расчет общего передаточного отношения редуктора, определение оптимального количества ступеней, распределение общего передаточного отношения по ступеням, исходя из условия минимальных габаритов редуктора; определение геометрических параметров колес (определение модуля зацепления, количества зубьев, диаметров окружностей выступов, впадин, диаметров основных окружностей, межосевых расстояний, ширины венца, высоты зуба); определены кинематические характеристики редуктора, осуществлен расчет самого нагруженного вала и выбор способа крепления деталей редуктора, подшипников; произведен расчет коэффициента полезного действия редуктора.
Объем пояснительной записки к курсовому проекту (количество страниц): 31 страницы
Содержание
Введение
1. Библиографический поиск
2. Выбор типа передач и вида зацеплений
3. Разработка кинематической схемы
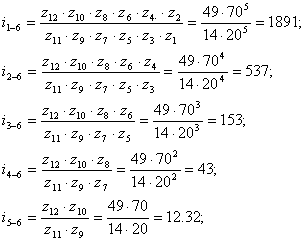
3.1 Определение общего передаточного отношения
3.2 Определение числа ступеней
4. Расчет кинематики и геометрии
4.1 Расчет кинематики редуктора
4.2 Геометрия
5. Разработка конструкции редуктора
5.1 Выбор конструкции цилиндрических зубчатых колес
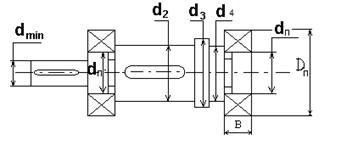
5.2 Конструктивное выполнение и исполнение валов
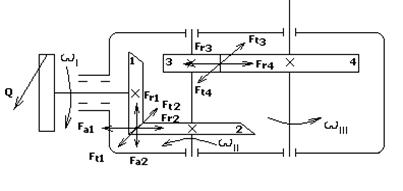
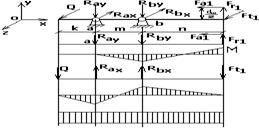
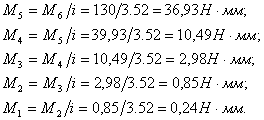
5.3 Выбор и расчет опор
5.4 Определение КПД
Заключение
Список использованной литературы
Введение
ОБРАЗОВАНИЕ МЕХАНИЧЕСКОГО ПРИВОДА
Приводом называют устройство, приводящее в движение машину или механизм. Он включает в себя обычно: источник энергии — двигатель, передаточный механизм на основе механических передач, согласующий скорости и моменты двигателя и рабочего органа машины (механизма), и аппаратуру управления.
Лишь в редких случаях, когда угловые скорости валов двигателя и машины совпадают, применяют непосредственное их соединение муфтой (например, в приводах вентиляторов, насосов и т. п.).
Выбор типа механической передачи для привода является одной из инженерных задач, решаемых при разработке проекта машины, прибора или аппарата на основе технико-экономического сопоставления. Исходными данными для этого служат внешние характеристики передачи: тип машины и назначение передачи; передаваемая мощность и частоты вращения входного и выходного валов, взаимное расположение и расстояние между этими валами; условия технического обслуживания, ресурс привода и др. Варианты передач сравнивают по КПД, массе, габаритам, стоимости проектирования, производства, эксплуатации и т. п. На принимаемые решения существенное влияние оказывают накопленный в машиностроении опыт проектирования, производства и эксплуатации различных передач, техническая оснащенность промышленных предприятий отрасли и другие факторы.
РЕДУКТОРЫ
В качестве передаточного механизма привода наиболее часто используют редуктор. Редуктором называют агрегат с передачами зацепления, который предназначен для повышения вращающего момента и уменьшения угловой скорости приводного двигателя.
Редукторы широко применяют в различных отраслях машиностроения, т. е. имеют общемашиностроительное применение, благодаря удовлетворению общим техническим требованиям (экономическим, потребительским и т. п.)
Внешние (потребительские) характеристики редукторов каждого типа определяются следующими основными параметрами: передаточным отношением (частотой вращения выходного вала) — кинематической характеристикой редуктора; вращающим моментом и допускаемой консольной нагрузкой на выходном валу — силовыми характеристиками редуктора; коэффициентом полезного действия.
Редукторы общемашиностроительного применения в приводах комплектуются преимущественно четырехполюсными электродвигателями. Для обеспечения потребностей народного хозяйства промышленность выпускает редукторы и мотор-редукторы в широком диапазоне передаточных отношений от imin= 1 (для одноступенчатых конических и цилиндрических редукторов) до imax = 3150 (для мотор-редукторов, планетарных и некоторых других типов редукторов). Большинство отечественных и зарубежных редукторов выполняют с передаточными отношениями i≤ 160. Около 75% редукторов изготавливается в двухступенчатом исполнении при i = 8...40. Зубчатые редукторы выпускают серийно в одно-, двух- и трехступенчатом исполнении. Ряд одноступенчатых редукторов цилиндрических (т. е. с цилиндрическими колесами) типа ЦУ обеспечивает передачу вращающих моментов на тихоходном валу от 250 до 4000 Н-м при i = 2...6,3.
Ряд двухступенчатых редукторов цилиндрических типа Ц2У в диапазоне i = 8...40 способен также передать вращающий момент Гт = = 250...4000 Н•м. В редукторах этого типа использовано зубчатое эвольвентное косозубое зацепление.
Промышленность выпускает также подобные редукторы Ц2У-Н и Ц2Н с зацеплением Новикова и др.
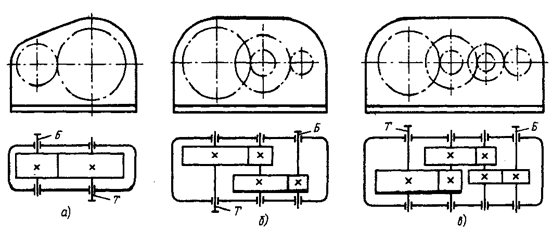
Распространены соосные редукторы, которые имеют меньшие габариты по длине.
Для уменьшения условий работы наиболее нагруженной тихоходной ступени изготовляют редукторы с раздвоенной быстроходной ступенью в виде двух косозубых пар для обеспечения равномерного распределения нагрузки между ними. Колеса одной пары имеют левые зубья, а колеса другой пары — правые зубья. Один из валов раздвоенной передачи должен допускать осевую само-установку. Редукторы с раздвоенной ступенью имеют на 20 % меньшую массу, чем редукторы с развернутой схемой колес, но более трудоемки в изготовлении.
Трехступенчатые редукторы типа ЦЗУ и др. имеют развернутую схему расположения колес. Используются также трехступенчатые редукторы с раздвоенной второй ступенью.
Для передачи вращения между пересекающимися валами применяют коническо-цилиндрические редукторы типа КЦ1. Быстроходная ступень — коническая с круговыми зубьями, так как конические колеса больших размеров труднее изготовить, чем цилиндрические колеса. Тихоходная ступень косозубая.
Менее распространены другие схемы редукторов.
Промышленность серийно выпускает мотор-редукторы — агрегаты, в которых конструктивно объединены электродвигатель и редуктор: мотор-редукторы цилиндрические двухступенчатые соосные типа МЦ2С, мотор-редукторы планетарные зубчатые двухступенчатые типа МПз2 и мотор-редукторы волновые горизонтальные типа МВз.
Получили распространение навесные редукторы и мотор-редукторы. Их выходной вал выполняется полым со шлицевым отверстием или канавкой под шпонку. Такой вал соединяется непосредственно с входным валом приводимой машины.
Похожие работы
... профиль головки зуба, доведённый до цилиндра, оформленного конструктивно в виде так называемой цевки. Поэтому цевочное зацепление целесообразно назвать цевочным часовым зацеплением. 5. Разработка кинематической схемы а) Определение обще-передаточного отношения. Zi+1 – число зубьев ведомого колеса. б) Определение числа ступеней. Точность работы будет тем больше, чем меньше число ...
... w и Т заносятся в таблицу 3.1. Примечание. Для одноступенчатого редуктора крутящий момент определяется по формуле , [Н·м]; , [Н·м]; [Н·м]; , [Н·м]. [Н·м]. Расчет клиноременной передачи Расчет клиноременной передачи проводим исходя из ранее рассчитанной мощности электродвигателя, Рэд и принятого передаточного отношения клиноременной передачи iр.п.=2. Определение сечения ремня ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
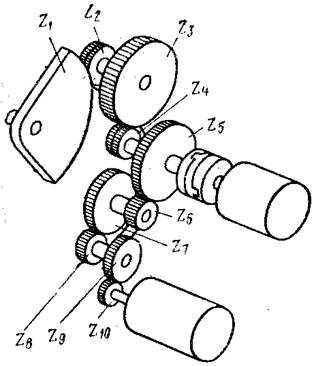
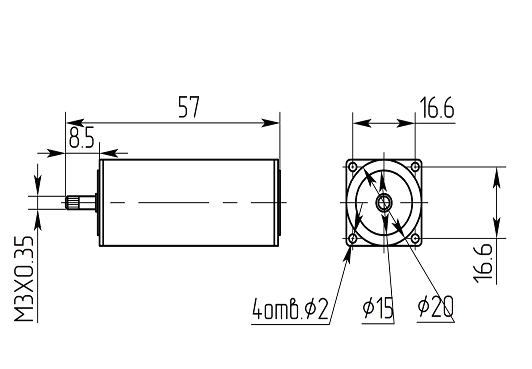
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев