Навигация
Конструктивное выполнение и использование валов
43940
знаков
3
таблицы
5
изображений
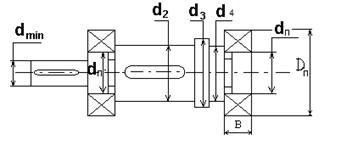
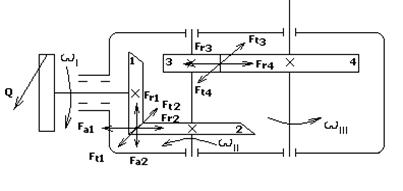
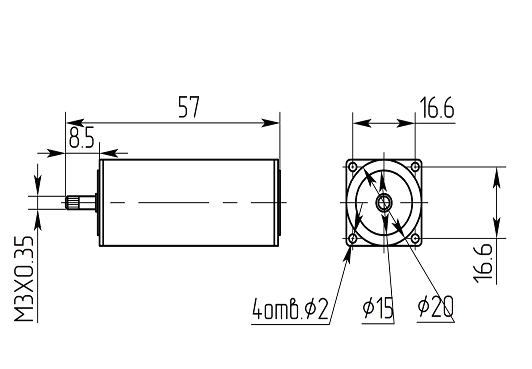
5.2 Конструктивное выполнение и использование валов
dв![]()
![]() - диаметр вала по моменту кручения
- диаметр вала по моменту кручения![]()
[![]() kp]=(15…20) H/мм2
kp]=(15…20) H/мм2
dв1![]()
![]()
![]() 0,9≈1
0,9≈1
dв2![]()
![]()
![]() 1,1≈1
1,1≈1
dв3![]()
![]()
![]() 1,4≈1,5
1,4≈1,5
dв4![]()
![]()
![]() 1,8≈2
1,8≈2
dв5![]()
![]()
![]() 2,4≈2,5
2,4≈2,5
dв6![]()
![]()
![]() 3,4≈3
3,4≈3
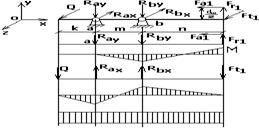
5.3 Выбор и расчет опор
ОПОРЫ ВАЛОВ И ОСЕЙ
ОБЩАЯ ХАРАКТЕРИСТИКА ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
Общие сведения. Подшипник скольжения является парой вращения, он состоит из опорного участка вала (цапфы) и собственно подшипника котором.
Их используют в качестве опор валов и осей механизмов и машин в тех случаях, когда применение подшипников качения затруднено или невозможно по ряду причин: высокие вибрационные и ударные нагрузки; низкие и особо высокие частоты вращения; работа в воде, агрессивных средах, а также при недостаточном смазывании или без смазывания; необходимость выполнения диаметрального разъема; отсутствие подшипников качения требуемых диаметров (миниатюрные и особо крупные валы) и др.
Надежность работы подшипников в значительной мере определяет работоспособность и долговечность машин.
Благодаря бесшумности и указанным выше достоинствам, а также по конструктивным и экономическим соображениям опоры скольжения находят широкое применение в паровых и газовых турбинах, двигателях внутреннего сгорания, центробежных насосах, центрифугах, металлообрабатывающих станках, прокатных станах, тяжелых редукторах и пр.
По виду трения скольжения различают:
подшипники сухого трения — работают на твердых смазочных материалах без смазочного материала;
подшипники граничного (полужидкостного) трения;
подшипники жидкостного трения
подшипники с газовой смазкой.
По виду воспринимаемой нагрузки и подшипники подразделяю на-
радиальные — воспринимают радиальную нагрузку
упорные — воспринимают осевые силы
радиально-упорные — воспринимают радиальные и осевые нагрузки; обычно их функции выполняют упорные подшипники, совмещенные с радиальными.
Цапфу, передающую радиальную нагрузку, называют шагом — при расположении ее в конце вала и шейкой — если она находится в середине вала. Цапфу, передающую осевую нагрузку, называют пятой, а подшипник подпятником.
Форма рабочей поверхности подшипников и цапф может быть цилиндрической, конической и шаровой. Конические и шаровые подшипники применяются редко.
Самое главное требование- малое трение
При выборе шарикоподшипников исходят из усилия, возникающие при зацеплении зубчатых колес.
При выборе шарикоподшипников исходят из усилий, возникающих при зацеплении зубчатых колес. Для цилиндрической передачи это усилие:
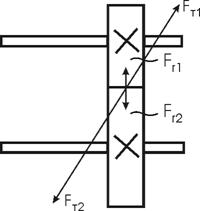
 - окружное усилие
- окружное усилие
![]() - радиальное усилие
- радиальное усилие
где ![]()
Радиальная сила направлена к центру зубчатого колеса.
Подшипники выбираются в зависимости от действующих нагрузок, так как здесь действует радиальная сила. Выбор ведется по внутреннему диаметру подшипника ГОСТ 8338 – 75: получаем, что первому валу соответствует подшипник 1000091, второму валу – 1000091/1,5, третьему – 1000092, четвертому – 1000093.
Правильность выбора подшипника определяется по его динамической грузоподъемности. Для этого используется следующая формула:
 - долговечность в часах
- долговечность в часах
где С - динамическая грузоподъемность, n – число оборотов, Р – эквивалентная динамическая нагрузка. А Р, в свою очередь, вычисляется по формуле:
![]()
где Х – коэффициент нагрузки, V – коэффициент вращения, Кб – коэффициент безопасности, КТ – температурный коэффициент.
Для прямозубых цилиндрических передач:
Х = V = Кб = КТ =1,
 - грузоподъемность,
- грузоподъемность, ![]()
Вычислим окружное усилие, радиальное усилие, грузоподъемность и результаты запишем в таблицу 3
| № колеса | Окружное усилие, Н | Радиальное усилие, Н | Грузоподъемность, Н |
| 1 | 6 | 2,18 | 25,6 |
| 2 | 13 | 4,73 | 55,5 |
| 3 | 33 | 12 | 140,8 |
| 4 | 93 | 34 | 399,16 |
Ft= 2Mкр/d – окружное усилие
Ft1= 2*0,0025/0,001= 5
Ft2 2*0,0045/0,001= 9
Ft3 2*0,009/0,0015= 12
Ft4 2*0,0198/0,002= 19,8
Ft5 2*0,04752/0,0025= 38,016
Ft6 2*0,133056/0,003= 88,704
F![]() = Ft·tg
= Ft·tg![]() – радиальное усилие
– радиальное усилие
F![]() 1= 5·tg20= 1,82
1= 5·tg20= 1,82
F![]() 2= 9·tg20= 3,28
2= 9·tg20= 3,28
F![]() 3= 12·tg20= 4,37
3= 12·tg20= 4,37
F![]() 4= 19,8·tg20= 7,21
4= 19,8·tg20= 7,21
F![]() 5= 38,016·tg20= 13,84
5= 38,016·tg20= 13,84
F![]() 6= 88,704·tg20= 32,29
6= 88,704·tg20= 32,29
Для прямозубых цилиндрических передач:
X=V= Kб= Kt=1
C=F![]()
![]() 6
6
L=104 час
C![]() Cтабл
Cтабл
C1=1,82![]() 6=0,005
6=0,005
C2=3,28![]() 6=0,0075
6=0,0075
C3=4,37![]() 6=0,01
6=0,01
C4=7,21![]() 6=0,019
6=0,019
C5=13,84![]() 6=0,0349
6=0,0349
C6=32,29![]() 6=0,068
6=0,068
5.4 Определение КПД
ηр=η1·η2·η3·η4·η5
ηi=1-cπf(1/z1+1/z2)*1/2
f=0,15
c= (F![]() +2,87)/( F
+2,87)/( F![]() +0,17)
+0,17)
c1=(1,82+2,87)/(1,82+0,17)= 2,36
c2=(3,28+2,87)/(3,28+0,17)=1,78
c3=(4,37+2,87)/(4,37+0,17)=1,59
c4=(7,21+2,87)/(7,21+0,17)=1,37
c5=(13,84+2,87)/(13,84+0,17)=1,19
η1=1-1,82*3,14*0,15(1/24+1/43)*1/2= 0,96
η2=1-1,78*3,14*0,15(1/24+1/49)*1/2= 0,97
η3=1-1,59*3,14*0,15(1/24+1/54)*1/2= 0,97
η4=1-1,37*3,14*0,15(1/24+1/55)*1/2= 0,98
η5=1-1,19*3,14*0,15(1/24+1/68)*1/2= 0,98
ηр=η1·η2·η3·η4·η5
ηр=0,96·0,97·0,97·0,98·0,98= 0,87=87%
Заключение
При проектировании редуктора находят практические приложения такие важнейшие сведения из курса, как расчеты на контактную и объемную прочность, тепловые расчеты, выбор материалов и термообработок, масел, посадок, параметров шероховатости поверхности и т. д. При выборе типов передач, вида зацепления, механических характеристик материалов надо учитывать, что затраты на материалы составляют значительную часть стоимости машин: в редукторах общего назначения -85 %, в дорожных машинах — 75 %, в автомобилях — 70 % и т. д. Таким образом, изыскание путей снижения массы проектируемых объектов является важнейшей предпосылкой дальнейшего прогресса, необходимым условием сбережения природных ресурсов. Уместно отметить, что большая часть вырабатываемой в настоящее время энергии проходит через механические передачи, поэтому их КПД в известной степени определяет эксплуатационные расходы.
Наиболее полно требованиям снижения массы и габаритных размеров удовлетворяет привод с использованием планетарных передач. Этому виду передач посвящено большое внимание.
Список используемой литературы:
1. “Прикладная механика” авторы: Г.Б.Иосилевич, Г.Б.Строганов
2. П.Д.Дунаев, О.П.Леликов ”Конструирование узлов и деталей машин”
3. В.Н.Кудрявцева ”Курсовое проектирование деталей машин”
Похожие работы
... профиль головки зуба, доведённый до цилиндра, оформленного конструктивно в виде так называемой цевки. Поэтому цевочное зацепление целесообразно назвать цевочным часовым зацеплением. 5. Разработка кинематической схемы а) Определение обще-передаточного отношения. Zi+1 – число зубьев ведомого колеса. б) Определение числа ступеней. Точность работы будет тем больше, чем меньше число ...
... w и Т заносятся в таблицу 3.1. Примечание. Для одноступенчатого редуктора крутящий момент определяется по формуле , [Н·м]; , [Н·м]; [Н·м]; , [Н·м]. [Н·м]. Расчет клиноременной передачи Расчет клиноременной передачи проводим исходя из ранее рассчитанной мощности электродвигателя, Рэд и принятого передаточного отношения клиноременной передачи iр.п.=2. Определение сечения ремня ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев