Навигация
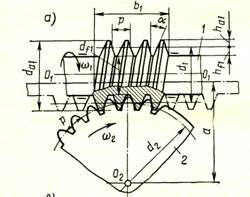
4.2 Геометрия
Воспользуемся следующими формулами:
d= mz – для делительной окружности
De= d+2m – диаметр выступа
Db= d-3m – диаметр впадины
a= m(z1+z2+…)/2 – межцентровое расстояние, z1– шестерня,
z2– колесо
b= (3…15)m – ширина венца
h= 2,5m – высота зуба
Предварительно выбираем значение модуля по Госту 9563–60
m= 0,3
Определим делительные окружности:
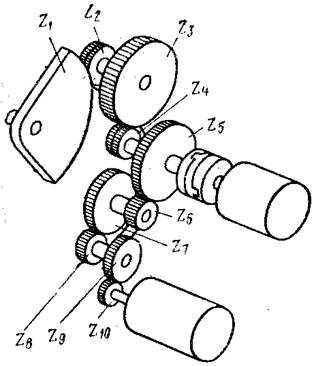
d1,3,5,7,9= mz1= 0,3·24= 7,2
d2= mz2= 0,3·43= 12,9
d4= mz4= 0,3·49= 14,7
d6= mz6= 0,3·54= 16,2
d8= mz8= 0,3·55= 16,5
d10= mz10= 0,3·68= 20,4
Определим диаметр выступа:
De1,3,5,7,9= d1,3,5,7,9+2m= 7,2+0,6= 7,8
De2= d2+2m= 12,9+0,6= 13,5
De4= d4+2m= 14,7+0,6= 15,3
De6= d6+2m= 16,2+0,6= 16,8
De8= d8+2m= 16,5+0,6= 17,1
De10= d10+2m= 20,4+0,6= 21
Определим диаметр впадины:
Db1,3,5,7,9= d1,3,5,7,9-3m= 7,2-0,9= 6,3
Db2= d2-3m= 12,9-0,9= 12,0
Db4= d4-3m= 14,7-0,9= 13,8
Db6= d6-3m= 16,2-0,9= 15,3
Db8= d8-3m= 16,5-0,9= 15,6
Db10= d10-3m= 20,4-0,9= 19,5
Определить межцентровое расстояние:
a1= m(z1+z2)/2= 0,3(24+43)/2= 10,05
a2= m(z1+z2)/2= 0,3(24+49)/2= 10,95
a3= m(z1+z2)/2= 0,3(24+54)/2= 11,7
a4= m(z1+z2)/2= 0,3(24+55)/2= 11,85
a5= m(z1+z2)/2= 0,3(24+68)/2= 13,8
Определим ширину венца:
b= (3…15)m= 10·0,3= 3
Определим высоту зуба:
h= 2,5m= 2,5·0,3= 0,75
5. Разработка конструкций редуктора
Разработка конструкции состоит в расчете и выборе его элементов: зубчатые колеса, валы, подшипники и корпуса.
ОБЩАЯ ХАРАКТЕРИСТИКА ВАЛОВ И ОСЕЙ
Назначение и классификация. Поддержания вращающихся деталей для передачи вращающего момента одной детали к другой (в осевом направлении) в конструкциях используют детали в форме тел вращения, называемые валами. В зависимости от вида испытываемой деформациусловно различают:
простые валы (валы) — работают в условиях кручения, изгиба и растяжения (сжатия), их применяют в передачах: зубчатых, ременных и др.;
торсионные валы (торсионы) — работают лишь в условиях кручения, т. е. передают только вращающий момент, соединяя обычно два вала на индивидуальных опорах;
оси — поддерживающие невращающиеся валы, работающие лишь в условиях изгиба и реже растяжения (сжатия.).
В зависимости от распределения нагрузок вдоль оси вала и условий сборки прямые валы выполняют гладкими или ступенчатыми, близкими по форме к балкам равного сопротивления изгибу. Гладкие валы более технологичны.
В специальных машинах (поршневых двигателях и компрессорах) используют коленчатые валы, имеющие «ломаную» ось.
Для передачи вращающего момента (вращения) между агрегатами со смещенными в пространстве осями входного и выходного валов применяют специальные гибкие валы, имеющие криволинейную геометрическую ось при работе. Такие валы обладают высокой жесткостью при кручении и малой жесткостью при изгибе.
В зависимости от расположения, быстроходности и назначения валы называю входными, промежуточными, выходными, тихо - или быстроходными, распределительными и т. п.
5.1 Выбор конструкции цилиндрических зубчатых колес
Конструкция определяется ГОСТом 13755-81
Для улучшения работоспособности тяжелонагруженных и высокоскоростных цилиндрических зубчатых передач- внешнего зацеплений рекомендуется применять исходный контур с модификацией профиля головки зуба, при этом линия модификации — прямая, коэффициент высоты модификации hg должен быть не более 0,45, а коэффициент глубины модификации ![]() * — не более 0,02.
* — не более 0,02.
Параметры модификации .профиля головки зуба исходного контура приведены в справочном приложении. Для передач, к которым предъявляются специальные требования, допускается применение исходных контуров, отличающихся от установленных настоящим стандартом, параметры которых должны устанавливаться в отраслевых стандартах. Допускается изготавливать зубчатые колеса винтовых передач в соответствии с исходным -контуром, установленным настоящим стандартом.
Зубчатые колеса рекомендуется изготавливать без модификации профиля головки зуба, если в результате модификации головки величина части коэффициента торцевого перекрытия, определяемая участками главных профилен ε ам, скажется менее 1,1 у прямозубых передач. Зубчатые колеса передач внутреннего зацепления могут изготавливаться в соответствии с исходным контуром.
При окончательной обработке боковых поверхностей зубьев зубообрабатывающим инструментом следует с практически возможным приближением обеспечивать параметры модификации и переходные кривые, при этом действительная высота модификации головки зуба должна быть не более номинальной.
В технически обоснованных случаях, при массовом и крупносерийном производстве и для передач точнее 6-й степени точности рекомендуется изменение параметров модификации применительно к частным условиям работы передачи.
Похожие работы
... профиль головки зуба, доведённый до цилиндра, оформленного конструктивно в виде так называемой цевки. Поэтому цевочное зацепление целесообразно назвать цевочным часовым зацеплением. 5. Разработка кинематической схемы а) Определение обще-передаточного отношения. Zi+1 – число зубьев ведомого колеса. б) Определение числа ступеней. Точность работы будет тем больше, чем меньше число ...
... w и Т заносятся в таблицу 3.1. Примечание. Для одноступенчатого редуктора крутящий момент определяется по формуле , [Н·м]; , [Н·м]; [Н·м]; , [Н·м]. [Н·м]. Расчет клиноременной передачи Расчет клиноременной передачи проводим исходя из ранее рассчитанной мощности электродвигателя, Рэд и принятого передаточного отношения клиноременной передачи iр.п.=2. Определение сечения ремня ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
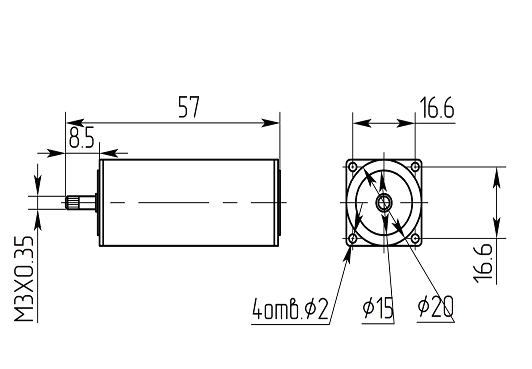
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев