Навигация
Расчет кинематики и геометрии
43940
знаков
3
таблицы
5
изображений
4. Расчет кинематики и геометрии
Основой для проведения расчетов является выбранный модуль и число зубьев колес.
4.1 Расчет кинематики редуктора
Расчет ведем по следующим формулам:
Uk= n2k-1/n2k= W2k-1/W2k
Wk= Tihk/30
Mk+1= Mk·Uk
M2= M1·U1= 25·10-4·1,8= 0,0045
M3= M2·U2= 0,0045·2= 0,009
M4= M3·U3= 0,009·2,2= 0,0198
M5= M4·U4= 0,0198·2,4= 0,04752
M6= M5·U5= 0,04752·2,8= 0,133056
n1=2052
n2= n1/U1= 2052/1,8= 1140
n3= n2/U2= 1140/2= 570
n4= n3/U3= 570/2,2= 259
n5= n4/U4= 259/2,4= 108
n6=n5/U5= 108/2,8= 38
Wk= Tihk/30≈0,1
W1= n1·Wk= 2052·0,1= 205,2
W2= n2·Wk= 1140·0,1= 114,0
W3= n3·Wk= 570·0,1= 57,0
W4= n4·Wk= 259·0,1= 25,9
W5= n5·Wk= 108·0,1= 10,8
W6= n6·Wk= 38·0,1= 3,8
Полученные данные занесем в таблицу 2
| Nвал | nвх | Wвх | М |
| 1 | 2052 | 205,2 | 0,0025 |
| 2 | 1140 | 114,0 | 0,0045 |
| 3 | 570 | 57,0 | 0,009 |
| 4 | 259 | 25,9 | 0,0198 |
| 5 | 108 | 10,8 | 0,04752 |
| 6 | 38 | 3,8 | 0,133056 |
Похожие работы
... профиль головки зуба, доведённый до цилиндра, оформленного конструктивно в виде так называемой цевки. Поэтому цевочное зацепление целесообразно назвать цевочным часовым зацеплением. 5. Разработка кинематической схемы а) Определение обще-передаточного отношения. Zi+1 – число зубьев ведомого колеса. б) Определение числа ступеней. Точность работы будет тем больше, чем меньше число ...
... w и Т заносятся в таблицу 3.1. Примечание. Для одноступенчатого редуктора крутящий момент определяется по формуле , [Н·м]; , [Н·м]; [Н·м]; , [Н·м]. [Н·м]. Расчет клиноременной передачи Расчет клиноременной передачи проводим исходя из ранее рассчитанной мощности электродвигателя, Рэд и принятого передаточного отношения клиноременной передачи iр.п.=2. Определение сечения ремня ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
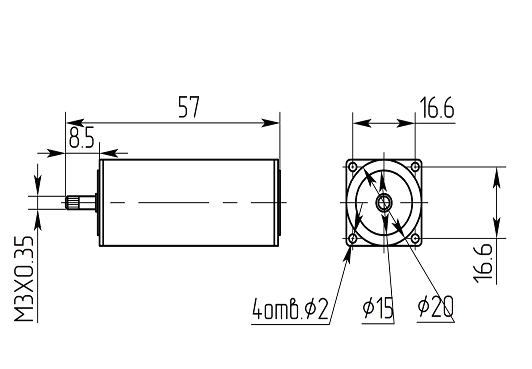
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев