Навигация
Определение числа зубьев
43940
знаков
3
таблицы
5
изображений
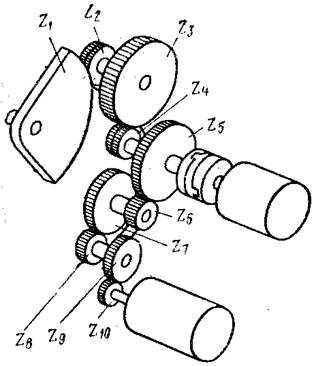
3.3 Определение числа зубьев
Минимальное число зубьев на шестерни для эвольвентного зацепления лежит в пределах от 17 до 28, причем в точных передачах надо приближаться к верхнему правому пределу. Ориентируясь на ГОСТ 13733-77 выбираю для первой шестерни
Z1 = 24
Для обеспечения технологичности и экономичности редуктора рекомендуется все шестерни делать одинаково. Поэтому
Z1 = Z3= Z5 = Z7= Z9= 24
Определим число зубьев шестерни
Uк = Z2i/Z2i-1
U1 = Z2/Z1
Z2 = U1·Z1 = 1,8·24 ≈ 43
Z4 = U2·Z3 = 2·24 = 48
Z6 = U3·Z5 = 2,2·24 ≈ 53
Z8 = U4·Z7 = 2,4·25 ≈58
Z10 = U5·Z9 = 2,8·24 ≈ 67
Полученные результаты сведём в таблицу 1.
| № колеса | Расчетная Z | ГОСТ Z |
| Z1 | 24 | 24 |
| Z2 | 43 | 43 |
| Z3 | 24 | 24 |
| Z4 | 48 | 48 |
| Z5 | 24 | 24 |
| Z6 | 53 | 53 |
| Z7 | 24 | 24 |
| Z8 | 58 | 58 |
| Z9 | 24 | 24 |
| Z10 | 67 | 67 |
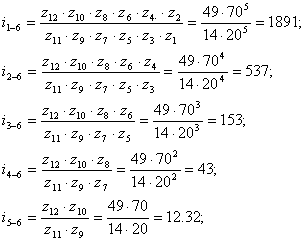
Определим общее передаточное отношение редуктора по ГОСТу
Uрг = Z2·Z4·Z6·Z8·Z10/ Z1·Z3·Z5·Z7·Z9
Определим погрешность придаточного отношения:
![]() = (Uр-Uрг/Uр) · 100%
= (Uр-Uрг/Uр) · 100%![]() 3%,
3%,
т.е. число зубьев колёс выбрано правильно.
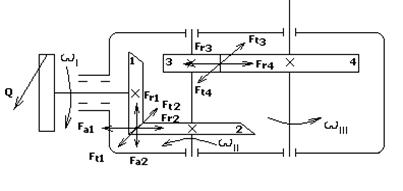
С учетом полученных данных строим кинематическую схему редуктора.
Похожие работы
... профиль головки зуба, доведённый до цилиндра, оформленного конструктивно в виде так называемой цевки. Поэтому цевочное зацепление целесообразно назвать цевочным часовым зацеплением. 5. Разработка кинематической схемы а) Определение обще-передаточного отношения. Zi+1 – число зубьев ведомого колеса. б) Определение числа ступеней. Точность работы будет тем больше, чем меньше число ...
... w и Т заносятся в таблицу 3.1. Примечание. Для одноступенчатого редуктора крутящий момент определяется по формуле , [Н·м]; , [Н·м]; [Н·м]; , [Н·м]. [Н·м]. Расчет клиноременной передачи Расчет клиноременной передачи проводим исходя из ранее рассчитанной мощности электродвигателя, Рэд и принятого передаточного отношения клиноременной передачи iр.п.=2. Определение сечения ремня ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
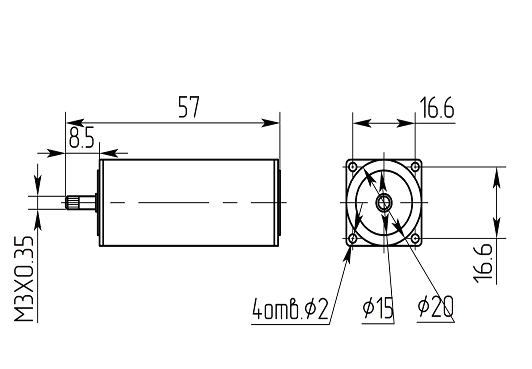
вляет собой четырёхступенчатый редуктор. Привод механизма осуществляется электродвигателем серии ДПМ-20 переменного тока, широко применяющегося в системах автоматики. В данном курсовом проекте программный механизм приводится в действие от электродвигателя постоянного тока серии ДПМ (тип двигателя из условия ДПМ-20). Распределение передаточных отношений производится с учетом получения минимальных ...
0 комментариев