Навигация
Довільно вибирається база графіка
38221
знак
1
таблица
27
изображений
1. Довільно вибирається база графіка.
2. Рахуємо масштаб по осі φ1:
 , мм/град
, мм/град
3. Якщо заданий симетричний вид графіка, тоді:
φуд = φсб à bуд = bсб
У загальному випадку закон руху може бути несиметричним.
4. Задамося довільним чином а1= 40 ÷ 50 мм. Тоді
а2= а1/ν
Виникає питання: яким повинна бути відстань х ?
Його знаходять з умови рівності площ під, і над віссю φ1.
Чому треба витримувати рівність площ?
Фізичний зміст площі під кривою швидкості на ділянці φуд - максимальне видалення (переміщення т.В штовхальника). Якщо площі не будуть рівновеликими, то штовхальник, піднявшись на одну величину, опуститься на іншу.
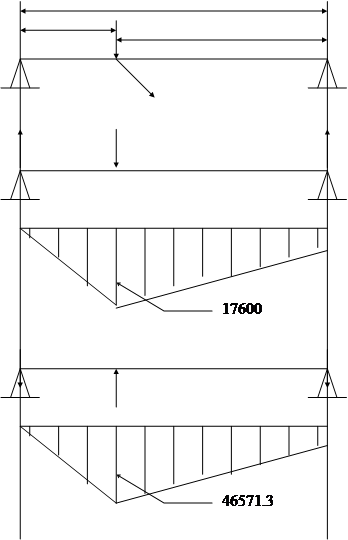
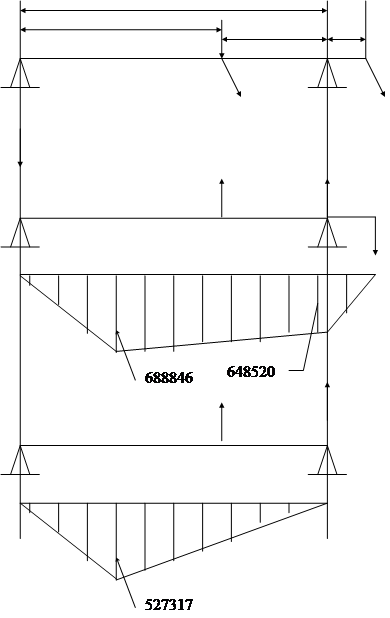
Побудувавши графік прискорення, будуємо графік швидкості методом графічного інтегрування, вибравши відрізок інтегрування ОК1. Інтегруючи графік швидкості (з відрізком інтегрування ОК2, звичайно ОК1=ОК2), одержуємо графік переміщення т.В штовхальника. Отриману ламану лінію заміняють плавною кривою. Розрахунок масштабу:
(уSВ)max на графіку переміщень виходить автоматично, і його величина залежить від відрізка ОК2. Тоді, знаючи хід штовхальника, масштаб переміщення буде:
μ=
Потім у першому наближенні приймаємо, що кулачок обертається рівномірно, тоді кут повороту кулачка пропорційний часу повороту, і осі φ і t збігаються, але кожна вісь має свій масштаб.
де b – в [мм]; частота обертання кулачка n – [об/мин]; φраб – [град].
Масштаб швидкості : 
Масштаб прискорення: 
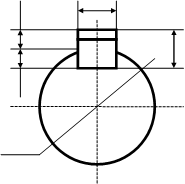
3.6.2 Визначення мінімального радіуса кулачкової шайби по відомому закону руху штовхальника
а) для кулачка з поступально рухаючимся штовхальником:
Дано: sB=f(φ1); vB= f(φ1); [θ]
Визначити: ro min за умови, що кут тиску в будь-якій точці профілю кулачка не перевищує припустимий.
Порядок побудови графіка кінематичних відношень:
1. проводиться вертикальна вісь sB,мм уздовж якої від довільно обраної точки Во (початок відліку) відкладаються відрізки переміщення т.В, узяті з графіка sB=f(φ1). Масштаб по осі μs* переміщень може дорівнювати масштабу графіка переміщень μs.
2. у кожній з отриманих точок визначають відрізки кінематичних відношень, полічені в масштабі μs*, і відкладають їх під кутом 90º по напрямку обертання кулачка.
 мм
мм
Там, де відрізок має максимальне значення, відновлюється перпендикуляр, і під кутом [θ] проводиться промінь.
Якщо враховувати реверс, то другий промінь проводять під кутом [θ] через відрізок кінематичних відношень, відкладений під кутом 90º у напрямку реверса і маючи максимальне значення. Якщо реверс не враховувати, другий промінь проводять через т.Во під кутом [θ]. Якщо допускається позавісність, то вона буде рівна е1*. Якщо позавісність дорівнює нулю, то центр кулачка буде в т.О1:
ro = O1Bo
Якщо позавісність задана в технічному завданні, наприклад ліва, то проводять пряму, рівнобіжну прямої О1Во і віддалена від неї на відстані, рівній величині позавісності е1, з урахуванням масштабу μs*. У підсумку одержують точку О1**.(рис.3.11).
Рис.3.11
б) для кулачка з хитним штовхальником:
Порядок побудови: У довільному місці вибирається точка Со, з якої радіусом, рівним довжині штовхальника, проводять дугу окружності. По хордах відкладають переміщення т.В. Отримані точки послідовно з'єднують з т.Со.
1. На цих прямих і на їхньому продовженні відкладаються відрізки кінематичних відношень, полічені в масштабі μs* по вищенаведеній формулі. Там, де відрізок має максимальне значення, відновлюється перпендикуляр, і під кутом [θ] проводиться промінь.
2. Якщо враховувати реверс, то другий промінь проводять під кутом [θ] через відрізок кінематичних відншень, відкладений під кутом 90º по напрямку реверса і який має максимальне значення. Центр кулачка буде в т.О1*:
ro = O1Bo
Якщо реверс не враховувати, то другий промінь проводять через т. Во під кутом [θ]. Центр кулачка буде в т.О1*: ro = O1*Bo (рис.3.12).
Рис.3.12
3.6.3 Побудова профілю кулачка
а) з поступально рухаючимся штовхальником (рис. 3.13.а):
Дано: ro min, позавісність ліва е, φраб = ψраб, ωк=ω1, sB = f(φ1)
Потрібно побудувати профіль кулачка.
У зверненому русі кулачок обертається з кутовою швидкістю, рівною
ω1 + (–ω1) = 0.
Порядок побудови:
На окружності, радіусом r =ro , проведеній в масштабі μl, з лівої сторони від осі О1 на відстані е вибирається точка Во (перетинання осі штовхальника, що відстає на величину е від точки О1, з окружністю ro min). Точку Во з'єднують з центром О1. Від отриманого променя ВоО1 у напрямку (–ω1) відкладають кут φраб=ψраб і проводять промінь О1В10. Отримана дуга ВоВ10 ділится на 10 рівних частин. В кожній із позицій 1,2… проводиться положення осі штовхальника в зверненому русі, при цьому вісь штовхальника, переміщаючи в напрямку (–ω1), буде увесь час торкатися окружності радіуса е, проведеної з центра О1 з урахуванням масштабу μl. В кожній із позицій від точок 1,2,3… відкладають переміщення т.В штовхальника уздовж осі штовхальника, узяті з графіка переміщень з урахуванням співвідношення масштабів μl і μs. Отримані крапки 1*,2*,3*… з'єднують плавною кривою й одержують центровий чи теоретичний профіль. Для побудови робочого профілю необхідно знати радіус ролика штовхальника. Якщо він не заданий, то його вибирають з конструктивних розумінь:
rp= ro min
ro min
Крім того, радіус ролика повинен бути таким, щоб при побудові профілю кулачка не було загострення у вершині кулачка. Вибравши радіус ролика, з будь-яких точок теоретичного профілю кулачка (чим частіше, тим краще) проводять дуги окружності r=rp внутрішнім чином. Провівши огинаючу до дуг, одержують робочий профіль кулачка. Якщо потрібно побудувати профіль кулачка з поступально рухаючимся штовхальником і позавісністю е=0, тоді порядок побудови профілю буде таким же, тільки вісь штовхальника буде проходити через центр обертання кулачка О1.
рис. 3.13.а рис. 3.13.б
б) с хитним штовхальником (рис. 3.13.б):
Дано:
ro min, lт, φраб = ψраб, ωк=ω1, sB = f(φ1),aw (з креслення для визначення ro мin)
Потрібно побудувати профіль кулачка.
Порядок побудови:
У масштабі μl проводяться окружності радіусами ro і aw. У довільному місці окружності з r = aw виберемо т.С0. З'Єднаємо точку С0 з точкою О1. Від отриманого променя в напрямку (–ω1) відкладемо кут φраб = ψраб, одержимо точку С10. Дугу С0С10 розділимо на 10 рівних частин (одержимо точки С1,С2,С3…– положення осі штовхальника в зверненому русі). З отриманих точок проводимо окружності радіусом lт до перетинання з окружністю радіуса ro_min. З отриманих точок 1,2,3... по хордах відповідних дуг відкладають переміщення т.В штовхальника, узятих із графіка переміщення з урахуванням масштабу μl. Отримані точки 1*,2*,3*… з'єднують плавною кривою - теоретичний профіль кулачка. Радіусом ролика проводять дуги в середину і будують огинаюючу лінію. Це і є дійсний профіль кулачка.
Похожие работы
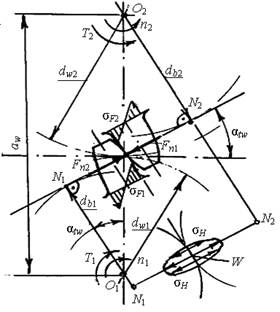
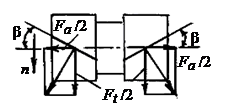
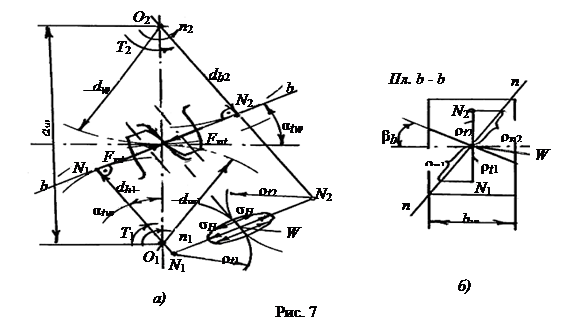
... колес нарезают тем же инструментом, что и прямые, установленным относительно заготовки под углом β. Расчет на прочность принято вести для прямозубой передачи. Для этого все зубчатые и червячные передачи приводятся к эквивалентным прямозубым цилиндрическим. Эквивалентные параметры косозубого цилиндрического колеса (приведение рассматривалось в курсе "Теория машин и механизмов"): делительный ...
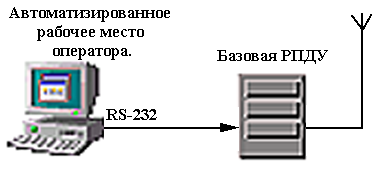
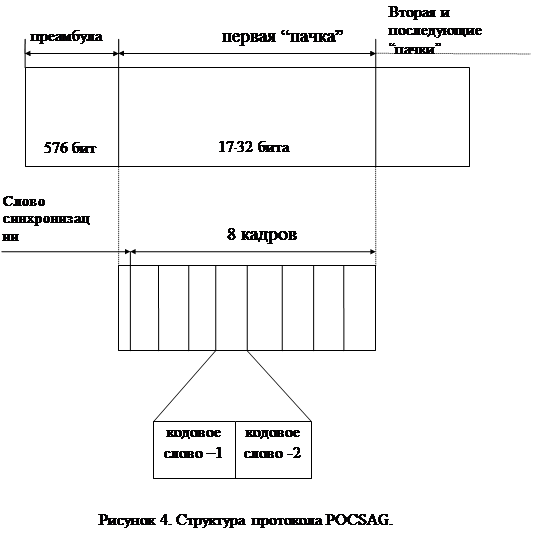
... указания. 1 Цель: 1.1 Изучить наиболее распространенные стандарты систем персонального радиовызова общего пользования. 2 Литература: 2.1 Соловьёв А. А., Смирнов С. И. Техническая энциклопедия пейджинговой связи. Эко-Трендс М:, 1998 стр. 18-50. 2.2 Громов Ю. А. Стандарты и системы подвижной радиосвязи. Эко-Трендс М:, 1998 стр. 39-52 2.3 Приложение к ...
... 195.7 9 2 25.47 392.6 8.49 4 1.3 60.81 164.4 10 2 30.33 329.7 10.11 I - - 76 131.6 I I I 8 1.68 36.09 277.1 12.03 9 1.42 42.96 232.8 14.32 2. Расчет цепной передачи 2.1. Передаточное число передачи u = 3 2.2. Принимаем число зубьев для ведущей звездочки Z1= 25 таб. 11.4 [1] тогда ...
... Направление линии зуба правое. Вращение против часовой стрелки. при bm=35° при bm=35° Направление линии зуба левое. Вращение по часовой стрелке. 7. РАСЧЁТ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ 7.1 Выбор материалов червяка и червячного колеса Для изготовления червяков применяют углеродистые и легированные стали (см. табл. 3.1). Выбор марки стали зависит от назначаемой термообработки ...
0 комментариев