Тело обладает неограниченной теплопроводностью, что приводит к отсутствию градиента температуры по любому направлению в его объеме
Патентное исследование
Расчет тепловых сопротивлений
Внутренний диаметр сердечника D, м;
Потери в обмотке ротора
Синтез структурной схемы тепловой модели асинхронного двигателя
Автоматизация расчетов параметров тепловой модели асинхронного двигателя
Число параллельных ветвей а=1;
Экономический расчет
Навигация
Потери в обмотке ротора
Моделирование нагрева асинхронного двигателя
85971
знак
4
таблицы
45
изображений
2.4.2 Потери в обмотке ротора
Потери в коротозамкнутой обмотке ротора определяются по формуле [13]:
![]() , (2.101)
, (2.101)
где r2 – активное сопротивление фазы обмотки ротора, Ом;
I2 – ток ротора, А.
Активное сопротивление фазы обмотки ротора:
![]() , (2.102)
, (2.102)
где rст – активное сопротивление стержня клетки, Ом;
rкл – активное сопротивление короткозамыкающего кольца, Ом;
Активное сопротивление стержня клетки:
 , (2.103)
, (2.103)
где ρа – удельное сопротивление алюминия обмотки ротора при ожидаемой температуре, Ом∙м.
Активное сопротивление короткозамыкающего кольца:
 , (2.104)
, (2.104)
где Dкл,ср – средний диаметр короткозамыкающего кольца, м;
qкл – площадь поперечного сечения короткозамыкающего кольца, м2.
Коэффициент приведения тока кольца к току стержня:
 , (2.105)
, (2.105)
где p – количество пар полюсов.
Ток в обмотке ротора:
![]() , (2.106)
, (2.106)
где ki – коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2;
νi – коэффициент приведения токов.
Коэффициент, учитывающий влияние тока намагничивания и сопротивления обмоток на отношение I1/I2:
![]() . (2.107)
. (2.107)
Коэффициент приведения токов:
 , (2.108)
, (2.108)
где kоб1 – обмоточный коэффициент обмотки статора;
kск – коэффициент скоса пазов ротора.
2.4.3 Потери в стали пакета статора
При расчете электрических машин потери в стали, определяют через массу стали и удельные потери, которые в свою очередь определяются значением магнитной индукции в стали и частотой питающего напряжения [13,14,15]. Такой способ определения потерь неудобен из-за того, что необходимо знать значение магнитной индукции в сердечнике статора.
![]() , (2.109)
, (2.109)
где РΣ – суммарная мощность потерь в двигателе, Вт;
Рмех – мощность механических потерь, Вт;
Рдоб – мощность добавочных потерь, Вт.
Суммарная мощность потерь в двигателе:
 . (2.110)
. (2.110)
Мощность механических потерь [13]:
 , (2.111)
, (2.111)
где Кт – коэффициент механических потерь.
Коэффициент механических потерь для двигателей с 2 р=2
![]() , (2.112)
, (2.112)
при 2 р≥4 Кт=1.
Мощность добавочных потерь:
 . (2.113)
. (2.113)
3. Реализация тепловой модели асинхронного двигателя в программном пакете Matlab
3.1 Переход к операторной форме
Для решения системы дифференциальных уравнений (1.20) на ЭВМ при помощи приложения Simulink, входящего в состав пакета MatLab, представим ее в операторной форме. Следует заметить, что недостатком приложения Simulink является отсутствие задания начальных условий в блоке передаточных функций. Поэтому при преобразовании (1.20) необходимо учесть начальные условия, то есть начальные температуры меди и стали.
В системе (1.20) присутствуют превышения температур меди и стали, которые равны:
![]() , (3.1)
, (3.1)
![]() . (3.2)
. (3.2)
Подставив (3.1) и (3.2) в (1.20) и раскрыв скобки получим:
 (3.3)
(3.3)
Представим систему (7.3) в операторной форме, по правилам преобразования Лапласа:
 (3.4)
(3.4)
где θм(0) – начальная температура меди, 0С;
θст(0) – начальная температура стали, 0С;
Сгруппируем неизвестные θм(р) и θст(р) в левых частях уравнений (3.4), а остальные члены в правых частях:
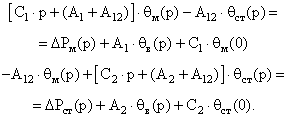 (3.5)
(3.5)
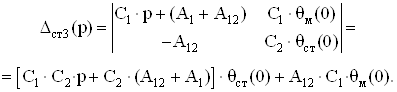
Представим систему (3.5) в матричной форме:
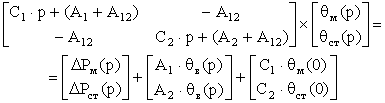 (3.6)
(3.6)
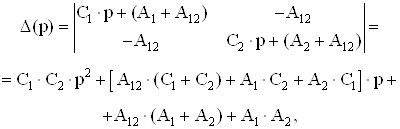
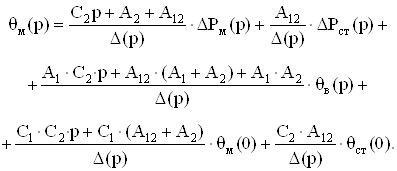
Решим систему (3.6) методом наложения относительно неизвестных θм(р) и θст(р). Решение имеет вид:
![]() , (3.7)
, (3.7)
![]() , (3.8)
, (3.8)
где
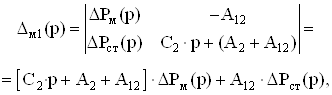
Подставив выражения (3.10), (3.11) и (3.12) в (3.7) получим:
Подставив выражения (3.13), (3.14) и (3.15) в (3.8) получим:
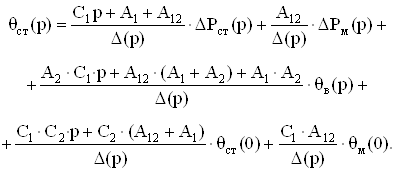
Выражения (3.16) и (3.17) являются окончательным решением для температур меди и стали в операторной форме. Значение Δ в выражениях (3.16) и (3.17) не раскрывается для сокращения записи.
Похожие работы
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
за счет снижения газоудерживающей способности теста. Процесс уплотнения поверхностного слоя тестовой заготовки приводит к ускоренному повышению температуры тестовой заготовки, т.е. кривая скорости изменения температуры поверхностного слоя начинает расти. Рост кривой продолжается до точки “г”, после прохождения которой начинается процесс интенсивного газовыделения, связанного с резким снижением ...
0 комментариев