Определение числа и типа ТЭД
Предварительное определение расчетной скорости тепловоза
Предварительное определение расчетной силы тяги тепловоза и ограничений тяговой характеристики
Построение рациональной тяговой и технико–экономических характеристик
Расчет рациональных тяговой и технико-экономической характеристик проектируемого тепловоза
Определение параметров и характеристик электрического тормоза проектируемого тепловоза
Навигация
Определение параметров и характеристик электрического тормоза проектируемого тепловоза
Расчет электрической передачи мощности тепловоза
23742
знака
8
таблиц
6
изображений
4 Определение параметров и характеристик электрического тормоза проектируемого тепловоза
На тепловозах наибольшее распространение получили схемы реостатного торможения, в которых якорные обмотки ТЭД присоединяются к тормозным резисторам, а обмотки возбуждения (соединенные в последовательную цепь) получают независимое питание от ВУ. Это обеспечивает гибкость управления скоростью движения при плавном регулировании тормозной силы в широком диапазоне.
Сопротивление тормозного резистора (Ом) определяется по формуле
где ![]() – максимальные напряжение и ток ТЭД, в тормозном режиме, (в курсовой работе рекомендуется принять их равными номинальным значениям напряжения и тока ТЭД в тяговом режиме).
– максимальные напряжение и ток ТЭД, в тормозном режиме, (в курсовой работе рекомендуется принять их равными номинальным значениям напряжения и тока ТЭД в тяговом режиме).
![]()
Расчет предельных тормозных характеристик тепловоза рекомендуется производить в следующей последовательности:
1) Определяется максимальная ЭДС ТЭД, работающего в тормозном режиме (в режиме генератора),
![]()
где ![]() – сопротивления цепи тормозного тока (при температуре
– сопротивления цепи тормозного тока (при температуре ![]() ), Ом;
), Ом;
![]() – соответственно сопротивления обмоток якоря и дополнительных полюсов ТЭД, Ом;
– соответственно сопротивления обмоток якоря и дополнительных полюсов ТЭД, Ом;
![]() = 0,63 + 0,0164 + 0,01038 = 0,654 Ом
= 0,63 + 0,0164 + 0,01038 = 0,654 Ом
![]() = 687,6 ∙ 0,654 = 449,6 В
= 687,6 ∙ 0,654 = 449,6 В
2) Строится предельная зависимость тормозной силы тепловоза от скорости ![]() при постоянном значении максимального тока возбуждения генерирующего ТЭД. Для ее построения достаточно определить одну точку, так как в этих условиях
при постоянном значении максимального тока возбуждения генерирующего ТЭД. Для ее построения достаточно определить одну точку, так как в этих условиях ![]() – линейная функция, проходящая через начало координат. Приняв
– линейная функция, проходящая через начало координат. Приняв ![]() , по нагрузочным характеристикам определяется величина
, по нагрузочным характеристикам определяется величина ![]() . Затем определяется необходимая частота вращения якоря генерирующего ТЭД (при котором может быть достигнута
. Затем определяется необходимая частота вращения якоря генерирующего ТЭД (при котором может быть достигнута ![]() ) :
) :

и необходимая скорость движения тепловоза VH.
![]()
![]()
Тормозная сила тепловоза (Н) при этих условиях


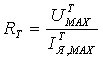
Таким образом, на тормозной характеристике имеем точку (А) с координатами ![]() . Проведя прямую через начало координат и точку (А), получаем ограничение тормозной силы тепловоза по максимальному току возбуждения генерирующего ТЭД (прямая 1 на рисунке 6);
. Проведя прямую через начало координат и точку (А), получаем ограничение тормозной силы тепловоза по максимальному току возбуждения генерирующего ТЭД (прямая 1 на рисунке 6);
3) Строится предельная тормозная характеристика по максимальному току якоря генерирующего ТЭД. Для ее построения необходимо: задаться несколькими значениями скорости в диапазоне от ![]() до
до ![]() , подставить их в уравнение, вычислить значение тормозной силы тепловоза при
, подставить их в уравнение, вычислить значение тормозной силы тепловоза при ![]() (вид этого ограничения представлен на рисунке 6 кривой 2);
(вид этого ограничения представлен на рисунке 6 кривой 2);
Таблица 5 – Расчет предельной тормозной характеристики по максимальному току якоря генерирующего ТЭД
| VН, км/ч | 35,14 | 45 | 65 | 85 | 100 | 110 |
| ВН, Н | 256325,8 | 200162 | 138573,7 | 105968,1 | 90072,88 | 81884,44 |
4) Ограничение тормозной силы тепловоза по коммутации в зоне высоких скоростей в курсовой работе может быть определено из условия:
![]()
где ![]() – критерий удовлетворенности коммутации ,
– критерий удовлетворенности коммутации , ![]() ,
,
![]() =18
=18 ![]()
![]()
Задаваясь значениями скорости в диапазоне от ![]() до
до ![]() , вычисляем соответствующие им максимально допустимые по условиям коммутации значения
, вычисляем соответствующие им максимально допустимые по условиям коммутации значения ![]() . Эти значения токов (с соответствующими им значениями скорости) подставляются в уравнение, после чего определяются значения ограничения тормозной силы тепловоза по коммутации (вид этого ограничения на рисунке 6 представлен кривой 3).
. Эти значения токов (с соответствующими им значениями скорости) подставляются в уравнение, после чего определяются значения ограничения тормозной силы тепловоза по коммутации (вид этого ограничения на рисунке 6 представлен кривой 3).
Таблица 6 – Расчет ограничения тормозной силы тепловоза по коммутации
| NКТ, Н | 2132,26 | 2092,51 | 2009,94 |
| V, км/ч | 96,99 | 57,18 | 32,41 |
|
| 395,72 | 658,71 | 1116,29 |
| ВН, Н | 30758,62 | 144567,27 | 732481,13 |
5) Для построения ограничения тормозной характеристики тепловоза по условию сцепления колес с рельсами используется формула
![]()
где ![]() – коэффициент сцепления колеса с рельсом при реостатном торможении.
– коэффициент сцепления колеса с рельсом при реостатном торможении.
Вид этого ограничения на рисунке представлен кривой 4.
Таблица 7 – Расчет ограничения тормозной характеристики тепловоза по условию сцепления колес с рельсами
| V, км/ч | 25 | 30 | 35 | 35,14 | 40 | 45 |
| ψ | 0,223185 | 0,215966 | 0,209875 | 0,209718 | 0,204667 | 0,200162 |
| ВН, Н | 361696,6 | 349997,3 | 340125,9 | 339871,7 | 331685,3 | 324385,2 |
Построим также зависимость мощности ВУ (отдаваемой в цепь возбуждения генерирующих ТЭД) от скорости движения тепловоза. Для ее построения определяется мощность ВУ в (кВт) по формуле
![]()
где ![]() – величина сопротивления балластного резистора;
– величина сопротивления балластного резистора;
обычно, ![]() =0,3 Ом;
=0,3 Ом;
![]() – сопротивление обмотки возбуждения ТЭД, приведенное к
– сопротивление обмотки возбуждения ТЭД, приведенное к ![]() ,Ом.
,Ом.
Задавшись рядом значений скорости от ![]() до
до ![]() , определяем соответствующие им значения чисел якоря
, определяем соответствующие им значения чисел якоря ![]() генерирующего ТЭД и
генерирующего ТЭД и ![]() . Затем по нагрузочным характеристикам при токе равном
. Затем по нагрузочным характеристикам при токе равном ![]() по значениям
по значениям ![]() определяются необходимые величины тока возбуждения генерирующих ТЭД –
определяются необходимые величины тока возбуждения генерирующих ТЭД – ![]() .
.
Вид зависимости ![]() представлен кривой 5.
представлен кривой 5.
Рисунок 8 – Предельные тормозные характеристики тепловоза
Таблица 8 – Расчет зависимости мощности ВУ от скорости движения тепловоза
| V, км/ч | 35,14 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 |
| n*, c-1 | 10,65252 | 12,12581 | 15,15726 | 18,18871 | 21,22016 | 24,25161 | 27,28306 | 30,31451 | 33,34596 |
|
| 42,20598 | 37,07795 | 29,66236 | 24,71863 | 21,1874 | 18,53898 | 16,47909 | 14,83118 | 13,48289 |
|
| 640,6732 | 501,8873 | 339,2907 | 255,9199 | 208,6274 | 179,8618 | 161,461 | 149,2431 | 140,9013 |
|
| 166,8118 | 102,3685 | 46,78402 | 26,61716 | 17,68873 | 13,14714 | 10,59471 | 9,051953 | 8,068334 |
5 Разработка силовой схемы проектируемой ЭПМ
Тепловоз выполнен с электропередачей на переменно-постоянном токе. Переменное шестифазное напряжение тягового генератора СГ выпрямляется установкой ВУ и подается на восемь параллельно включенных тяговых электродвигателей, приводящих тепловоз в движение. К тяговому генератору электродвигатели подключаются с помощью восьми электропневматических поездных контакторов П1—П8, которые позволяют разрывать цепи электродвигателей, чтобы предотвратить самопроизвольное движение тепловоза от остаточного магнетизма при работе генератора на холостом ходу, а также быстро отключить неисправный электродвигатель
Скорость тепловоза и тяговое усилие регулируются возбуждением тягового генератора и изменением частоты вращения вала дизеля, задаваемой позицией контроллера машиниста. Для расширения диапазона скоростей тепловоза, при которых используется полная мощность дизеля, существуют ступень ослабления возбуждения тяговых электродвигателей: на 64% (ОП-1). Ослабление возбуждения осуществляется подключением резисторов СШ1—СШ8 параллельно обмоткам возбуждения тяговых двигателей с помощью групповых контакторов ВШ. Переход на ослабленное возбуждение и обратно осуществляется автоматически с помощью реле перехода РП, включающих и отключающих групповые контакторы ВШ. Направление движения тепловоза зависит от изменения направления тока в обмотках возбуждения тяговых электродвигателей переключением контактов реверсора ПР.
Список используемых источников
1 А.В. Донченко, А.А. Зарифьян, А.В. Козубенко Электрические передачи локомотивов: Методические указания по выполнению курсового проекта для студентов IV курса специальности 150700 «Локомотивы». – Ростов н/Д: Рост. гос. ун-т путей сообщения, 2006. – 48 с.
2 Филонов С.П., Гибалов А.И., Быковский В.Е. Тепловоз 2ТЭ116. – М.: Транспорт, 1985. – 328 с.
Похожие работы
... 5 V 0 5 10 15 20 25 yк 0,30 0,272 0,251 0,236 0,223 0,213 Fк.сц 432,6 392,2 361,9 340 321,6 307,2 4.4 Построение тягово-энергетических характеристик тепловоза 2ТЭ121 На основании сводной таблицы (табл.3), полученной на основании расчётов на ПЭВМ в Math Cad строится тяговая характеристика тепловоза (рис.3). Тяговая характеристика тепловоза включает: 1) линии ...
... 5,75, а Z = 100 и z = 17. Централь передачи определяется по следующей формуле: (27) Подставляя численные значения, получаем: 1.7 Определение габаритных размеров Длина тягового электродвигателя ограничивается расстоянием между внутренними гранями колесных пар, которое для железных дорог равно 1,44 м. Однако здесь же ...
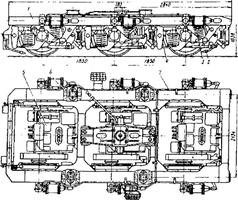
... ЭД-118А. На выходах шеек напрессовывают лабиринтные кольца уплотнения циркуляционной системы смазки. 3. Выбор оборудования и его компоновка на тепловозе Для определения весогабаритных характеристик основных узлов и оборудования следует ориентироваться на аналогичные параметры тепловоза прототипа. Для выполнения развески используется схема расположения узлов и оборудования (рис. 11). Развеска ...
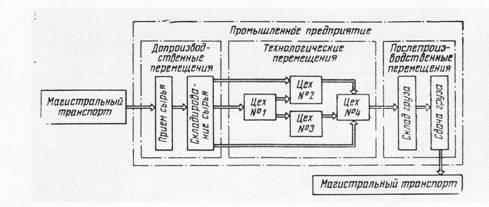
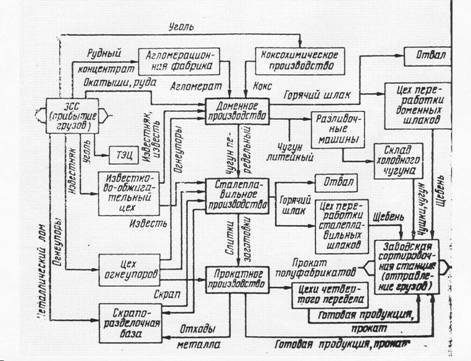
... со средой осуществляется с помощью внешнего промышленного транспорта через стыковые пункты. Следовательно, состав всей транспортной системы можно представить совокупностью трех подсистем со свойственными им конструктивными особенностями: внешнего промышленного транспорта, транспортных магистралей и пунктов их стыкования. Под пунктом стыкования понимают подсистему транспорта как комплекс ...
0 комментариев