Навигация
Кинематический анализ планетарного механизма
17004
знака
6
таблиц
7
изображений
1.5 Кинематический анализ планетарного механизма
Определим радиусы начальных окружностей:
r1 = d1/2= m·Z1/2= 6·14/2=84/2 = 42 мм
r2 =d2/2= m·Z2/2= 6·30/2=180/2 = 90 мм
r3 = d3/2= m·Z3/2= 6·22/2 =132/2 = 66 мм
r4 = d4/2= m·Z4/2= 6·38/2=228/2 = 114 мм
r5 = d5/2= m·Z5/2= 6·98/2 =588/2 = 294 мм.
Выбираем масштабный коэффициент: ![]() . С учетом масштабного коэффициента построим кинематическую схему редуктора. На кинематической схеме условно изображаем один сателлит.
. С учетом масштабного коэффициента построим кинематическую схему редуктора. На кинематической схеме условно изображаем один сателлит.
Вычислим скорость точки А, принадлежащей окружности колеса 1:
![]() ,
,
Где ![]() .
.
Va = ω1∙![]() 151∙
151∙![]()
Выбираю ![]() .
.
Скорость точки А является касательной к начальной окружности колеса 1 ![]() – вектор изображающий скорость точки А. Отрезок Аа - линия распределения скоростей точек колеса 1. Из точки В провожу горизонтальную линию. Из точки а через точку
– вектор изображающий скорость точки А. Отрезок Аа - линия распределения скоростей точек колеса 1. Из точки В провожу горизонтальную линию. Из точки а через точку ![]() провожу отрезок до пересечения с горизонтальной линией, проходящей через точку B. Полученный отрезок аb– линия распределения скоростей точек колес 2 и 3.
провожу отрезок до пересечения с горизонтальной линией, проходящей через точку B. Полученный отрезок аb– линия распределения скоростей точек колес 2 и 3.
Строю диаграмму угловых скоростей:
![]() .
.
Переношу на диаграмму угловых скоростей точку Р и распределения линейных скоростей параллельно самим себе.
Получаем угловые скорости колес графическим методом:
![]() ;
;
![]()
![]()
![]()
Проверим значения угловых скоростей аналитическим методом – методом Виллиса.
Механизм состоит из последовательно соединенных двух механизмов – простого и планетарного.
![]()
![]() .
.
По методу Виллиса всем звеньям планетарного механизма дополнительно сообщаем скорость равную ![]() . Получаем обращенный механизм.
. Получаем обращенный механизм.
Передаточное отношение в обращенном механизме:
С другой стороны
![]()
Тогда
![]()
Таким образом, получаем:
![]() ;
;
![]()
![]()
![]() ;
;
Чтобы найти ω4, определим передаточное отношение ![]() :
:
![]()
с другой стороны
![]()
Таким образом, получаем
![]()
Сравнение угловых скоростей, полученных аналитически и графически, представлено в таблице 3.6.
Таблица 1.5 – Сравнение данных аналитического и графического методов
| Метод определения | ω1, рад/с | ω2,3, рад/с | ω4, рад/с | ωН, рад/с |
| Аналитический |
|
|
|
|
| Графический |
|
|
|
|
| Расхождение, % | 0 | 0, 02 | 0,01 | 0,01 |
Похожие работы

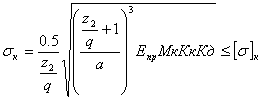
... проводят окружности радиусом rр и по внутренней огибающей этих окружностей проводят линию, которая является практическим профилем кулачка. 1.5 Расчет толщины кулачка Для нормальной работы кулачкового механизма необходимо выполнения условия контактной прочности: , где F – сила взаимодействия толкателя и кулачка [Н]; b – толщина кулачка [мм]; - приведенный модуль упругости; - ...
... , привода кинематической передачи и кулачкового механизма. Толкатель кулачкового механизма соединяется с исполнительным элементом системы управления движением летательного аппарата. Входной величиной программного механизма является число импульсов, подаваемых на шаговый электродвигатель, выполненный из электромагнита, храпового колеса, толкающей и стопорной собачек, а выходной – прямолинейное ...
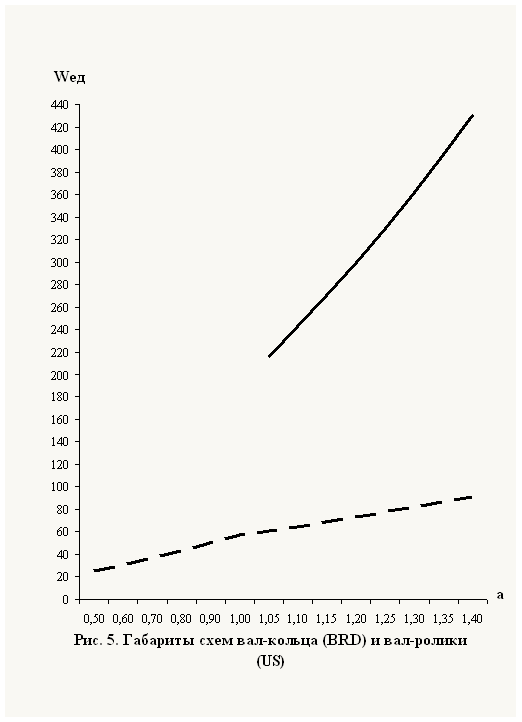
... механизмов, результаты вычисления сводим в табл. 1 и строим графики на рис. 5. Таблица 1. Вычисление габаритов схем валикокольцевых механизмов (ВКМ) a 0,50 0,60 0,70 0,80 0,90 1,00 1,05 1,10 1,15 1,20 1,25 1,30 1,35 1,40 - - - - - - 216,72 242,88 270,48 299,52 330 361,92 395,28 430,08 25,12 ...
... , , . Произведем оценку числа возможных вариантов, которые можно синтезировать на основе морфологической матрицы при наложении на нее граничных условий проектирования, а именно исключения вышеперечисленных вариантов: Для всего PC машины поточной линии прядильного производства оценка полных решений может быть проведена по следующей формуле: , где – количество исполнительных механизмов в ...
0 комментариев