Навигация
Разработка динамической модели привода с фрикционным вариатором
18012
знаков
1
таблица
24
изображения
Донецкий национальный технический университет
Квалификационная работа
На тему:
Разработка динамической модели привода с фрикционным вариатором
Выполнил:
Студент гр. МС-03н: Касатка П.О.
Руководитель: Деркач О.В.
Консультант: Горобець I.О.
ДОНЕЦЬК 2007РЕФЕРАТ
Бакалаврская работа: 38 страниц, 15 рисунков, 1 приложение, 1 таблица, 5 источников.
В данной бакалаврской работе необходимо разработать динамическую модель привода, содержащего фрикционный вариатор; составить дифференциальные уравнения, которые описывают динамические процессы в приводе.
Объект исследования: привод с фрикционным вариатором.
Цель работы: необходимо разработать динамическую модель привода, содержащего фрикционный вариатор, с помощью программного пакета MatLab Sіmulіnk, для обеспечения необходимых параметров переходного процесса.
ФРИКЦИОННЫЙ ВАРИАТОР, ПЕРЕХОДНЫЙ ПРОЦЕСС, ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ, ДИНАМИЧЕСКАЯ МОДЕЛЬ, ГЕОМЕТРИЧЕСКОЕ СКОЛЬЖЕНИЕ, МОМЕНТ ИНЕРЦИИ
Содержание
Введение
1 Общие сведения о фрикционных вариаторах
2 Исходные данные
3 Проектный расчет фрикционного вариатора по контактным напряжениям
4 Разработка динамической модели
4.1 Структурная схема объекта и процесса в нем
4.2 Анализ допущений и факторов, принимаемых при создании модели
4.3 Динамическая модель
4.4 Определение инерционных характеристик подвижных деталей и жесткости элементов привода
4.5 Реализация динамической модели в Simulink
5 Анализ динамических процессов в объекте
5.1 Анализ динамических процессов во временной области
5.2 Представление динамической модели в пространстве состояний
5.3 Проектирование модального регулятора
Заключение
Перечень ссылок
Приложение
Вступление
Большинство современных машин и установок создается по схеме: двигатель – передача – рабочий орган (исполнительный механизм). Необходимость введения передачи как промежуточного звена между двигателем и рабочими органами машины связано с решением задачи повышения производительности, т.е. увеличения их быстродействия.
Время срабатывания фрикционной передачи входит в общее время рабочего цикла машины, следовательно, влияет на производительность машины в целом. Проблема повышения производительности непосредственно связана с разработкой методов динамического исследования машин и выбора их оптимальных параметров и структуры.
С помощью динамической модели производится анализ системы, без участия реального объекта и на ее основе можно построить систему управления объектом, и пронаблюдать поведение системы управления и объекта.
1 Общие сведения о фрикционных вариаторах
Фрикционной называют передачу, работа которой основана на использовании сил трения, возникающих в месте контакта двух тел вращения под действием сжимающей силы Q.
Фрикционные передачи вращательного движения можно разделить на две основные группы: передачи нерегулируемые, т.е. с условно постоянным передаточным отношением, и передачи регулируемые, позволяющие плавно изменять передаточное отношение (бесступенчатое регулирование) (рис. 1.1).
Одной из наиболее простых и во многих случаях достаточно надёжной является фрикционная передача, состоящая в простейшем случае из двух колёс (катков), закреплённых на ведущем и ведомом валах. Для передачи движения без скольжения необходимо приложить к одному из колёс силу Q, достаточную для возникновения трения в месте контакта, при этом касательная сила их сцепления равна по величине передаваемого окружному усилию [1].
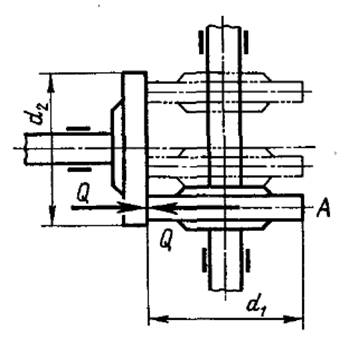
Рисунок 1.1 – Лобовой фрикционный вариатор
Достоинствами фрикционных передач являются: плавность и бесшумность в работе, простота конструкции, невозможность поломки при резком изменении крутящего момента на одном из валов благодаря возможности проскальзывания катков, возможность бесступенчатого регулирования скоростей на ходу, без остановки передачи.
Недостатками являются: необходимость прижимного устройства, большие давления на валы и опоры от действия внешней силы прижимного устройства, что увеличивает их размеры и делает передачу громоздкой, а также ограничивает величину передаваемой мощности; непостоянство передаточного отношения из-за проскальзывания катков; сравнительно высокий износ.
Фрикционные вариаторы применяют как в кинематических, так и силовых передачах в тех случаях, когда требуется бесступенчатое регулирование скорости (зубчатая передача не позволяет такого регулирования). Фрикционные вариаторы используются станкостроении, в литейных машинах, подъемных и транспортных машинах, приводах летательных аппаратов и металлорежущих станках, роботах и манипуляторах, цифровых следящих системах, механизмах для сельского хозяйства и других изделиях.
Значение фрикционных вариаторов как бесступенчатых регуляторов скорости возрастает в связи с широким фронтом работ по автоматизации управления производственными процессами.
Один из катков фрикционного вариатора изготовляют из качественных сталей (40, 50, ШХ15 и т.д.), а другой – из серого чугуна, текстолита, фибры и других пластмасс.
Из всех типов фрикционных бесступенчатых передач с твердыми телами касания лобовые фрикционные вариаторы конструктивно наиболее просты. В таком вариаторе возможно перемещать колесо по валу в направлениях, указанных стрелками, при этом передаточное отношение будет плавно меняться в соответствии с изменением рабочего диаметра диска.
Геометрическое скольжение вариатора определяют по формуле:
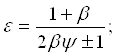
знак «+» - для ведущего колеса, знак «-» - для ведущего диска (рис 1.2 а и б),
где ![]() - радиус диска, при
- радиус диска, при ![]() скольжение максимальное;
скольжение максимальное;
b – ширина диска.
Рисунок 1.2 – Лобовой фрикционный вариатор:
а) с ведущим колесом; б) с ведущим диском
Основной недостаток лобовых вариаторов – большое геометрическое скольжение, поэтому в силовых передачах их диапазон регулирования передаточного отношения приходится ограничивать ![]() .
.
При ведущем колесе его радиус определяют по формуле:
 ;
;
где  .
.
При проектном расчете принимают:
![]() - коэффициент запаса сцепления;
- коэффициент запаса сцепления;
![]()
![]()
![]() - минимальный рабочий радиус диска.
- минимальный рабочий радиус диска.
Рабочие поверхности стальных фрикционных колес выполняются шлифованными с шероховатостью Ra 0,63 ... 0,32 мкм.
Соединение дисков с валами рекомендуется осуществлять шариковыми или винтовыми нажимными устройствами (рис. 1.3).
Во избежание чрезмерного скольжения центральную часть диска использовать не следует.
Расчет на контактные напряжения следует вести на минимальном диаметре диска, при котором требуется наибольшая сила нажатия и скольжение достигает наибольшей величины.
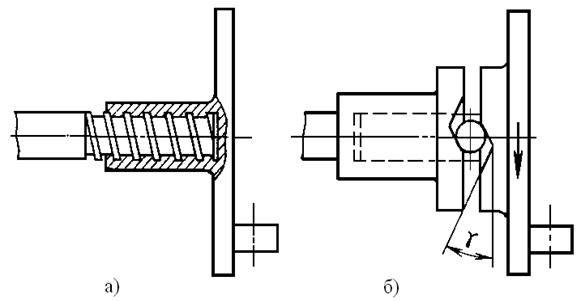
Рисунок 1.3 – Нажимные устройства: а) винтовое; б) шариковое
Похожие работы
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

... контроля" передаст сигнал в "Центр". Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта. 4.Монокар В современном мире существуют два основных типа транспортных средств. АВТОМОБИЛИ имеют более высокий комфорт, безопасность, грузоподъемность и т.д., но ...
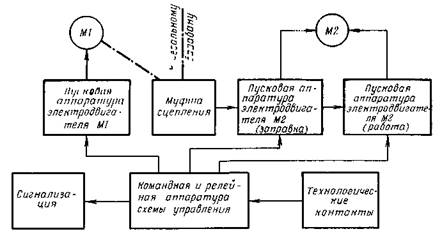
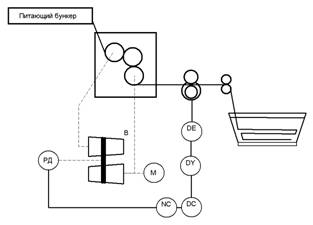
... М2 и зажигается сигнализация. После устранения технологических неполадок пуск электродвигателя М2 производится в приведенной выше последовательности. Фрагмент функциональной схемы автоматизации чесальной машины показан на рисунке 2. Мнемосхема выполненная в GENESIS на рисунке 3. Рисунок 2. Фрагмент функциональной схемы автоматизации чесальной машины. Регулятор ЛПЛ на чесальной машине ЧМД ...
0 комментариев