Навигация
2 Исходные данные
Рассчитаем лобовую фрикционную передачу для привода ленточного конвейера при условии, что ведущее колесо передает мощность Р = 2 кВт при угловой скорости ω1 =90 рад/с ведомому колесу, вращающемуся с угловой скоростью ω2max = 45 рад/с [2].
В качестве прижимного устройства выбираем винтовое прижимное устройство, обеспечивающее постоянную силу прижатия.
Назначаем материалы колес: меньшего — текстолит ПТК, а большего — сталь 45.
Принимаем диапазон регулирования передаточного отношения ![]()

Тогда,
Передаточное отношение определяем по формуле:
Крутящий момент Мn, передаваемый ведущим колесом
Для передачи заданной мощности, выраженной окружной силой  необходимо обеспечить условие
необходимо обеспечить условие ![]() где
где ![]() — сила трения между катками.
— сила трения между катками.
Тогда
где β – коэффициент запаса сцепления колес, β=1,3.
Момент трения определяем по формуле:
![]()
3 Проектный расчет фрикционного вариатора
по контактным напряжениям
Определим диаметр d1 меньшего колеса из условия контактной прочности. Принимаем коэффициент запаса сцепления колес β=1,3; коэффициент трения по длине контактной линии f=0,3; допускаемое контактное напряжение (текстолит по стали) [σ]k = 70 Н/мм2, модуль упругости для меньшего колеса (текстолит) Е1=6х103 МПа, для большего колеса (сталь) Е2 = 2,15х105 МПа.
Приведенный модуль упругости Е по формуле:

Диапазон регулирования:
где  .
.
При проектном расчете принимают ![]()
Конструктивно наибольший диаметр диска:
![]()
Геометрическое скольжение при ведущем колесе:

Остальные размеры колес принимают конструктивно.
4 Разработка динамической модели
4.1 Структурная схема объекта
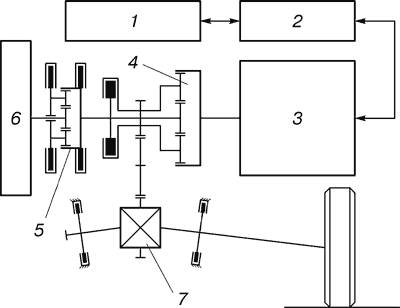
Рассматриваемая система состоит из электродвигателя, который создает момент двигателя Мn, муфты, ведущего колеса, ведомого диска, подшипников качения и рабочего органа. Двигатель создает крутящий момент с угловой скоростью ω, который передается через муфту на ведущее колесо, с него на ведомый диск, затем на рабочий орган (рис. 3.1). Винтовое прижимное устройство обеспечивает передачу крутящего момента.
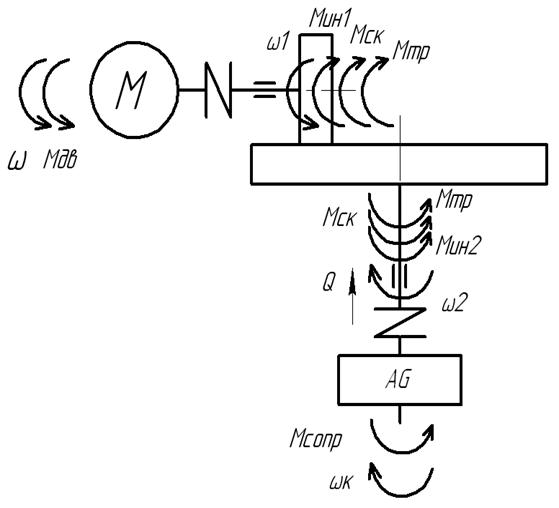
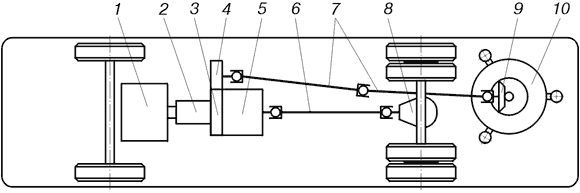
Рисунок 4.1 – Расчетная схема привода.
4.2 Анализ допущений, принимаемых при создании модели
Для создания модели принимаем электродвигатель, обеспечивающий постоянный крутящий момент, муфты с η =0,98, шариковые подшипники качения с η=0,99 и роликовые подшипники качения с η=0,97. Деформации колеса и диска не учитываются.
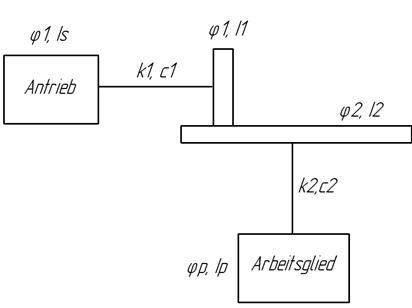
Рисунок 4.2 – Модель лобовой передачи
4.3 Динамическая модель
Модель имеет 4 степени свободы и движение тел, входящих в модель, описывается системой дифференциальных уравнений, на основании результатов решения которой получим динамические параметры привода. Система дифференциальных уравнений имеет вид [3]:
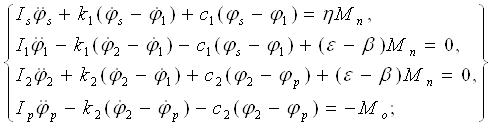
где Is, Ip – приведенные моменты инерции вращающихся деталей двигателя и рабочего органа;
I1, I2 – приведенные моменты инерции колеса и диска соответственно;
φs, φp, φi – угловые координаты вращающихся масс;
Мn – момент движущих сил (двигателя);
Мо – момент сил сопротивления (рабочего органа);
с1, с2 – жесткости валов;
k1, k2 – коэффициенты демпфирования;
ε – геометрическое скольжение.
На основании дифференциальных уравнений, которые описывают поведение привода в процессе работы, была составлена его динамическая модель. Далее выполняем исследование составленной модели. Нагружаем модель единичным ступенчатым воздействием, которое воздействует на вал двигателя.
Похожие работы
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

... контроля" передаст сигнал в "Центр". Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта. 4.Монокар В современном мире существуют два основных типа транспортных средств. АВТОМОБИЛИ имеют более высокий комфорт, безопасность, грузоподъемность и т.д., но ...
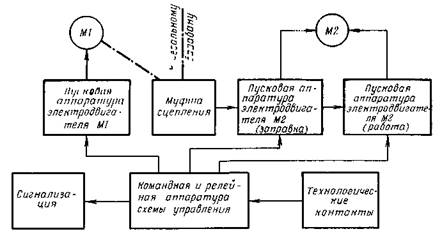
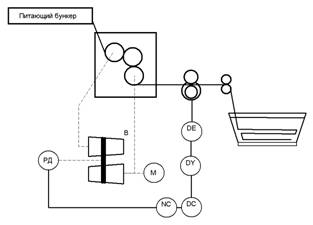
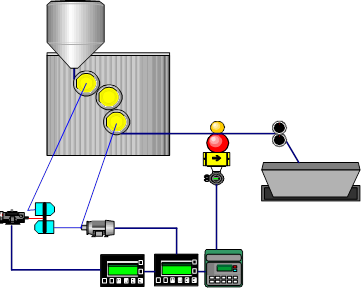
... М2 и зажигается сигнализация. После устранения технологических неполадок пуск электродвигателя М2 производится в приведенной выше последовательности. Фрагмент функциональной схемы автоматизации чесальной машины показан на рисунке 2. Мнемосхема выполненная в GENESIS на рисунке 3. Рисунок 2. Фрагмент функциональной схемы автоматизации чесальной машины. Регулятор ЛПЛ на чесальной машине ЧМД ...
0 комментариев