Навигация
Определение инерционных характеристик подвижных
18012
знаков
1
таблица
24
изображения
4.4 Определение инерционных характеристик подвижных
деталей и жесткости элементов привода
Моменты инерции вращающихся звеньев определяются расчетным путем [4]. Приведенный момент инерции вращающихся деталей двигателя:

где


Приведенный момент инерции вращающихся деталей рабочего органа:

где


Приведенный момент инерции колеса:

где


Приведенный момент инерции диска:

где



Рассчитаем жесткости валов:

где ![]() - модуль упругости 2-го рода (сдвига),
- модуль упругости 2-го рода (сдвига),

Жесткость шлицевого вала:
Жесткость винта:
4.5 Реализация динамической модели в Simulink
На основе системы дифференциальных уравнений (п. 4.3) с помощью интерактивной системы Simulink для моделирования нелинейных динамических систем составим схему динамической модели привода с фрикционным вариатором (рис. 4.3). Обозначения переменных, используемых в схеме динамической модели приведены в таблице 4.1.
Таблица 4.1 - Обозначения переменных, используемых
в динамической модели
| Описание переменной | Обозначение | Схема | Ед. |
| Приведенный момент инерции вращающихся деталей двигателя | Is | Is | кг*м2 |
| Приведенный момент инерции вращающихся деталей рабочего органа | Ip | Ip | кг*м2 |
| Приведенный момент инерции колеса | I1 | I1 | кг*м2 |
| Приведенный момент инерции диска | I2 | I2 | кг*м2 |
| Угловые координаты вращающихся масс | φs, φp, φi | - | рад |
| Момент движущих сил (двигателя) | Мn | Mn | Н*м |
| Момент сил сопротивления (рабочего органа); | Мо | Мо | Н*м |
| Жесткость шлицевого вала | с1 | с1 | Н/м |
| Жесткость винта | с2 | с2 | Н/м |
| Коэффициент демпфирования | k1 | k1 | - |
| Коэффициент демпфирования | k2 | k2 | - |
| Коэффициент запаса сцепления колес | β | b | - |
| Геометрическое скольжение | ε | е | - |
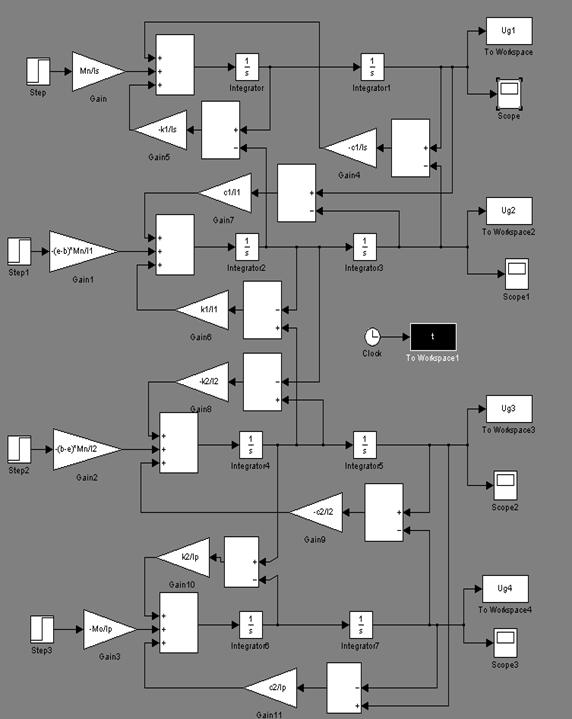
Рисунок 4.3 – Реализация динамической модели в Simulink
Исходные данные:
Is=1.3545;
Ip=1.6205;
I1=4.6934;
I2=262.0864;
c1=3163;
c2=3500;
Mn=22.2;
Mo=15;
e=0.08;
k1=0.7;
k2=0.7;
b=1,3.
Похожие работы
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

... контроля" передаст сигнал в "Центр". Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта. 4.Монокар В современном мире существуют два основных типа транспортных средств. АВТОМОБИЛИ имеют более высокий комфорт, безопасность, грузоподъемность и т.д., но ...
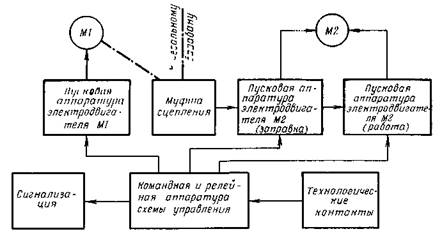
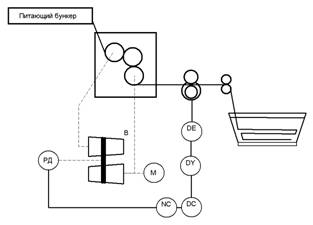
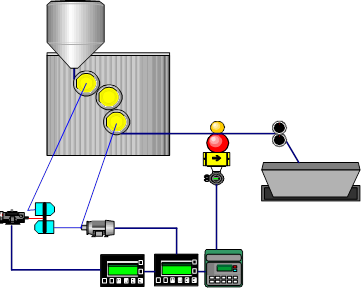
... М2 и зажигается сигнализация. После устранения технологических неполадок пуск электродвигателя М2 производится в приведенной выше последовательности. Фрагмент функциональной схемы автоматизации чесальной машины показан на рисунке 2. Мнемосхема выполненная в GENESIS на рисунке 3. Рисунок 2. Фрагмент функциональной схемы автоматизации чесальной машины. Регулятор ЛПЛ на чесальной машине ЧМД ...
0 комментариев