Навигация
Анализ динамических процессов в объекте
18012
знаков
1
таблица
24
изображения
5 Анализ динамических процессов в объекте
5.1 Анализ динамических процессов во временной области
Из анализа графиков видно, что из-за инерционных свойств объектов,
из-за упругих свойств, геометрического скольжения и силы трения разгон системы происходит замедленно. Перемещение диска в период первой секунды приложения крутящего момента вал двигателя, практически равно нулю (рис. 5.1–5.4).
Это обусловлено упругими свойствами вала и винта и инерционными свойствами колеса и диска, поэтому в момент пуска происходит задержка вращения, затем при преодолении крутящим моментом момента проскальзывания происходит вращение диска.
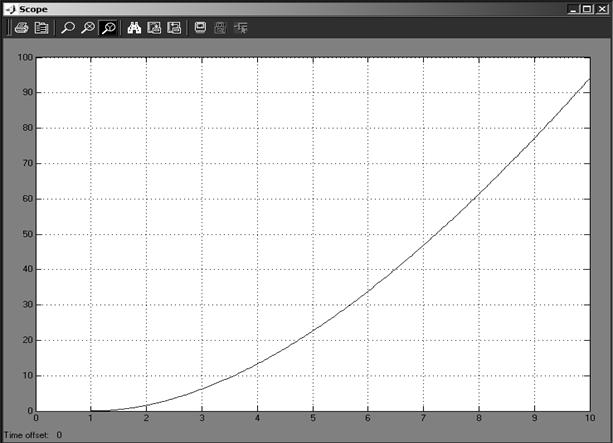
Рисунок 5.1 – Зависимость угла поворота вала двигателя (рад) от времени (с)
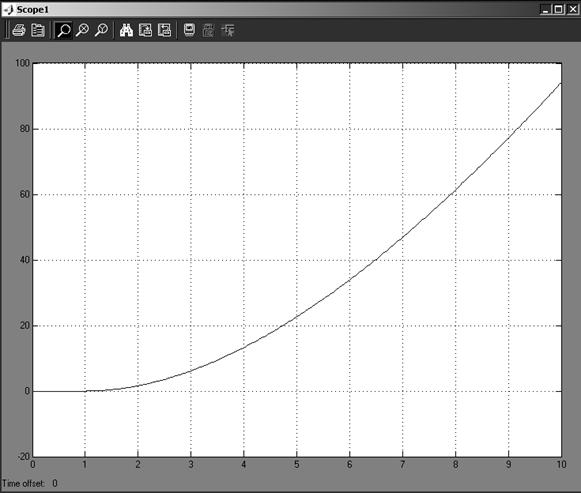
Рисунок 5.2 – Зависимость угла поворота колеса (рад) от времени (с)
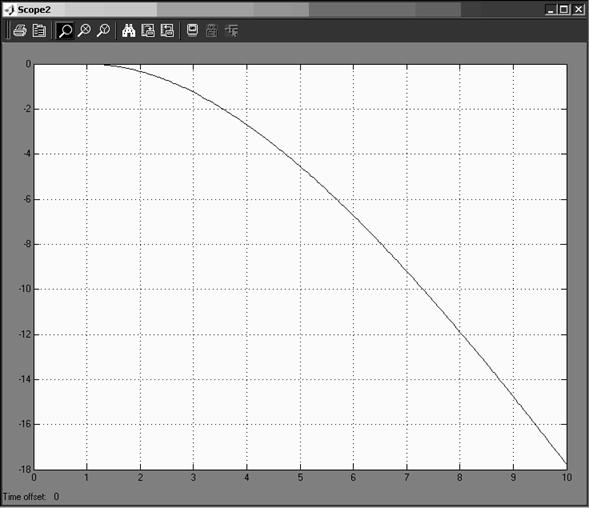
Рисунок 5.3 – Зависимость угла поворота диска (рад) от времени (с)

Рисунок 5.4 – Зависимость угла поворота рабочего органа (рад) от времени (с)
5.2 Представление динамической модели
в пространстве состояний
Динамическая модель, описанная дифференциальными уравнениями, может быть представлена в форме матричных уравнений (матрицы А, В, С, D) или представлена в виде передаточной функции. Так как модель имеет 4 степени свободы, то преобразование Лапласа необходимое для получения передаточной функции произвести достаточно трудно. Поэтому представим модель в форме матриц, используя для их расчета интерактивную систему MATLAB.
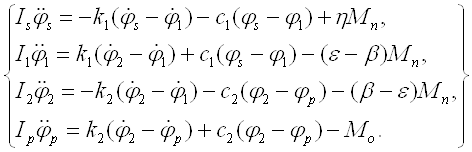
Дифференциальные уравнения динамической модели:
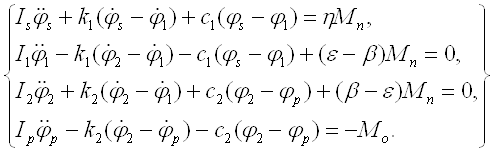
Преобразуем систему.
Представим модель в матричной форме:
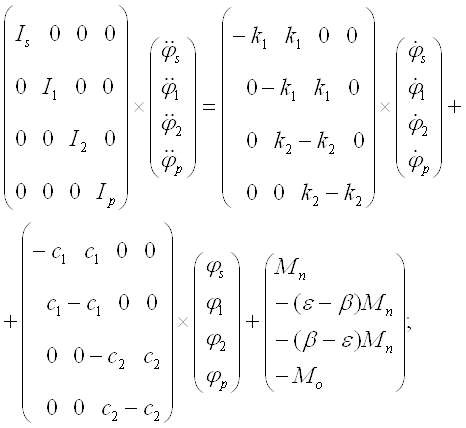
Введем следующие обозначения:
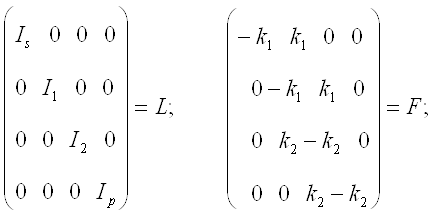
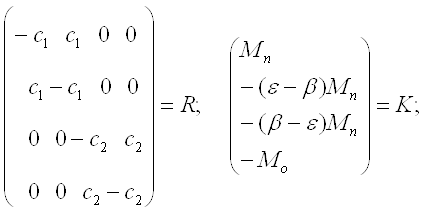
Динамическая модель принимает вид:
![]()
Умножим обе части уравнения на обратную матрицу ![]() :
:
![]()
Обратную матрицу ![]() с помощью MATLAB:
с помощью MATLAB:
L=[Is 0 0 0; 0 I1 0 0; 0 0 I2 0; 0 0 0 Ip];
inv(L)
ans =
0.7383 0 0 0
0 0.2131 0 0
0 0 0.0038 0
0 0 0 0.6171.
Умножим обратную матрицу ![]() на матрицу
на матрицу ![]() :
:
F=[-k1 k1 0 0; 0 -k1 k1 0; 0 k2 -k2 0; 0 0 k2 -k2];
ans =
-0.7000 0.7000 0 0
0 -0.7000 0.7000 0
0 0.7000 -0.7000 0
0 0 0.7000 -0.7000
ans=inv(L)*F
ans =
-0.5168 0.5168 0 0
0 -0.1491 0.1491 0
0 0.0027 -0.0027 0
0 0 0.4320 -0.4320
Умножим обратную матрицу ![]() на матрицу
на матрицу ![]() :
:
R=[-c1 c1 0 0;c1 -c1 0 0; 0 0 -c2 c2; 0 0 c2 -c2];
ans=R
-3163 3163 0 0
3163 -3163 0 0
0 0 -3500 3500
0 0 3500 -3500
ans=inv(L)*R
ans =
1.0e+003 *
-2.3352 2.3352 0 0
0.6739 -0.6739 0 0
0 0 -0.0134 0.0134
0 0 2.1598 -2.1598
Умножим обратную матрицу ![]() на матрицу
на матрицу ![]() :
:
К=[Mn; -(e-b)*Mn; -(b-e)*Mn; -Mo];
ans=K
22.2000
27.0840
-27.0840
-15.0000
ans=inv(L)*К
16.3898
5.7707
-0.1033
-9.2564
Матрицы А, В, С, D имеют вид:
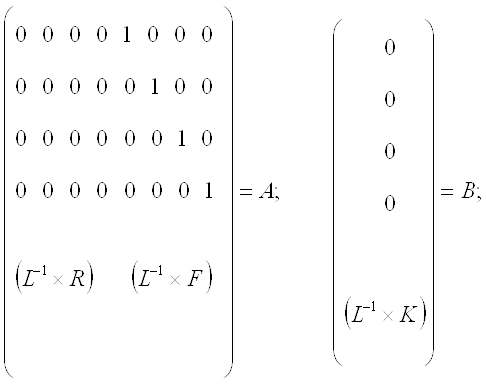
Введем полученные матрицы в M-file MATLAB и получим передаточную функцию динамической модели, которая описывает реакцию модели на скачкообразное задающее воздействие (рис. 5.5, 5.6).
A=[0 0 0 0 1 0 0 0;
0 0 0 0 0 1 0 0;
0 0 0 0 0 0 1 0;
0 0 0 0 0 0 0 1;
-2335.2 2335.2 0 0 -0.5168 0.5168 0 0;
673.9 -673.9 0 0 0 -0.1491 0.1491 0;
0 0 13.4 13.4 0 0.0027 -0.0027 0;
0 0 2159.8 -2159.8 0 0 0.4320 -0.4320];
B=[0; 0; 0; 0; 16.3898; 5.7707; -0.1033; -9.2564];
C=[1 0]; D=[0].
Передаточная функция имеет вид:
W(s) = (-2.132e-014 s^7 + 16.39 s^6 + 6.586 s^5 + 3.275e004 s^4 - 2343 s^3- 6.166e006s^2 - 7.573e004 s + 1.407e008)/(s^8 + 1.101 s^7 + 5156 s^6 + 3080 s^5 + 6.401e006 s^4 + 6.915e005 s^3 - 1.742e008 s^2 - 2.015e007 s + 2.25e-007).
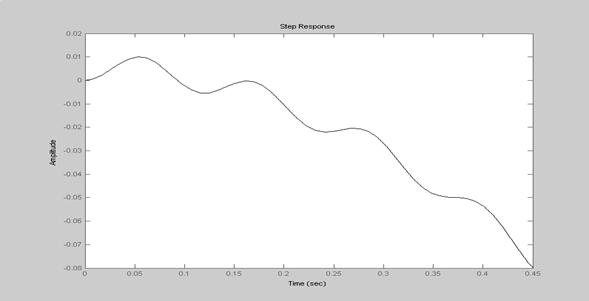
Рисунок 5.5 – Переходной процесс в динамической модели
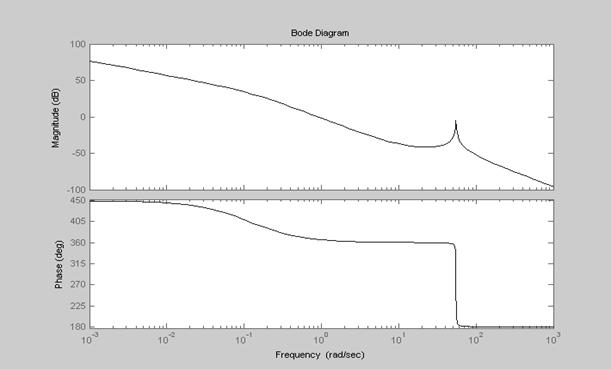
Рисунок 5.6 – Амплитудно-фазо-частотная и фазо-частотная характеристики
Из анализа графиков видно, что колебания в модели возрастают и она не устойчива. Поэтому необходимо спроектировать регулятор (корректирующее звено) (рис. 5.7), чтобы динамическая модель имела затухающие колебания при переходном процессе и малое время успокоения (1-5 секунд) с перерегулированием не более 10-15%.
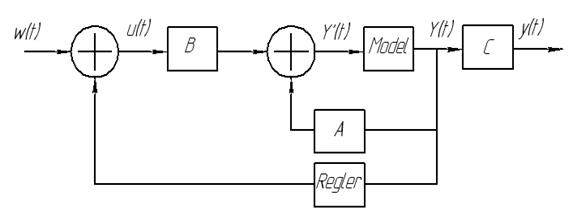
Рисунок 5.7 – Динамическая модель с модальным регулятором
5.4 Проектирование модального регулятора
Идея создания модального регулятора заключается в том, чтобы подобрать его коэффициенты так, чтобы полюса замкнутого контура регулирования оказались в заштрихованной области. Это обеспечит затухающие колебания при переходном процессе и малое время успокоения с перерегулированием не более 10-15% (рис. 5.7).
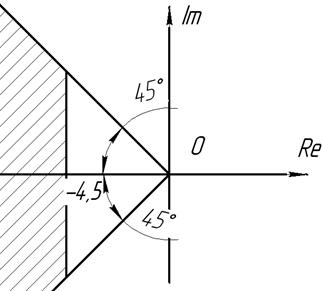
Рисунок 5.8 – Область расположения полюсов устойчивых систем
Для построения модального регулятора необходима проверка управляемости модели.
Проверку управляемости произведем с помощью критерия Калмана:
если ранг квадратной матрицы Ss(n,n)=[B A*B A2*B … An-1*B] равен порядку матрицы n, то модель, описываемая матрицами А, В, С, D, является управляемой. Порядок матрицы А динамической модели равен 8.
Ранг матрицы – максимальный размер квадратной матрицы, определитель которой не равен нулю.
Ранг матрицы можно определить с помощью функции rank в MATLAB:
Ss=ctrb(A,B);
rank(Ss);
ans=8.
Ранг матрицы А динамической модели равен порядку, значит модель управляема.
Методом подбора назначаем полюса для новой передаточной функции замкнутого контура. С помощью MATLAB можно найти коэффициенты модального регулятора и получить переходной процесс в динамической модели с регулятором (рис. 5.9).
p=[-7-0.2i -7+0.2i -5-0.5i -5+0.5i -5 -6 -17 -10];
k=place(A,B,p);
sysE=ss(A-B*k,B,C,D);
step(sysE)
Коэффициенты модального регулятора:
k=[-237.0116 237.0565 173.5746 -185.8740 8.6474 -8.5860 16.0462 14.2642].
Из анализа графика на рисунке 5.7 видно, что переходной процесс в системе заканчивается через 2,5 секунды без перерегулирования.
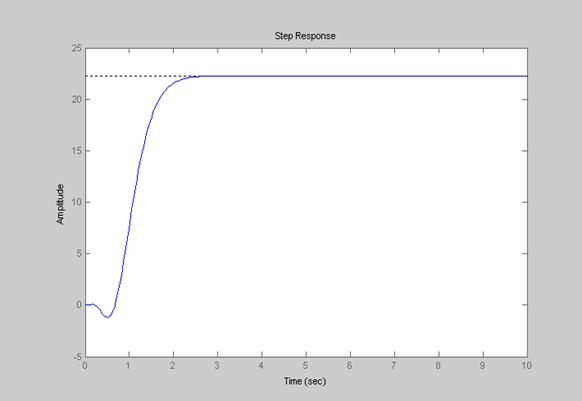
Рисунок 5.9 – Переходной процесс в динамической модели c регулятором
Заключение
В данной работе были изучены динамические процессы, возникающие в приводе с фрикционным вариатором. Выбраны исходные данные, приведен проектный расчет фрикционного вариатора, определены инерционные характеристики подвижных деталей и жесткости элементов привода.
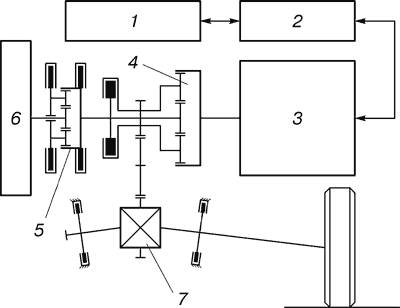
Была составлена структурная схема объекта исследования, математическое описание и динамическая модель, позволяющие изучить возможное поведение системы при действии на неё единичной нагрузки.
Также приведен анализ динамических процессов в объекте во временной области и пространстве состояний. Спроектирован модальный регулятор, который обеспечивает завершение переходного процесса в динамической модели за 2,5 секунды.
Литература
1. Гузенков П.Г. Детали машин: Учеб. для вузов. – М.: Высш. шк., 1986. – 359 с.
2. Бакаев Н.А., Волошина О.Н. Основы проектирования фрикционных передач. – Издательство Ростовского университета, 1985. – 176 с.
3. Пронин Б.А., Ревков Г.А. Бесступенчатые клиноременные и фрикционные передачи. – М.: Машиностроение, 1980. – 320 с.
4. Комаров М.С. Динамика механизмов и машин. Машиностроение, М., 1969.
5. Иванов Е.А. Муфты приводов. Машгиз, М, 1959.
Похожие работы
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...

... контроля" передаст сигнал в "Центр". Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта. 4.Монокар В современном мире существуют два основных типа транспортных средств. АВТОМОБИЛИ имеют более высокий комфорт, безопасность, грузоподъемность и т.д., но ...
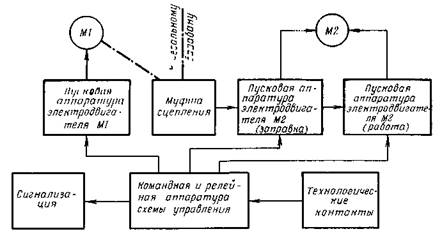
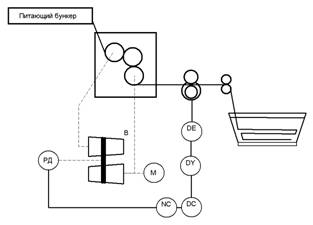
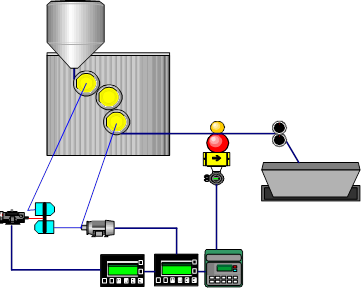
... М2 и зажигается сигнализация. После устранения технологических неполадок пуск электродвигателя М2 производится в приведенной выше последовательности. Фрагмент функциональной схемы автоматизации чесальной машины показан на рисунке 2. Мнемосхема выполненная в GENESIS на рисунке 3. Рисунок 2. Фрагмент функциональной схемы автоматизации чесальной машины. Регулятор ЛПЛ на чесальной машине ЧМД ...
0 комментариев