Навигация
Електромеханічний привід виконуючого механізму
34667
знаков
6
таблиц
7
изображений
Міністерство освіти і науки України
Полтавський національний технічний університет імені Юрія Кондратюка
Електромеханічний факультетКафедра обладнання нафтових та газових промислів
КУРСОВИЙ ПРОЕКТ
з дисципліни:
“Основи конструювання механічної частини електроприводів”
на тему:
“Запропонувати електромеханічний привід виконуючого механізму”
Варіант №6
Вступ
В цій РПЗ приведені деякі розрахунки електромеханічного приводу ланцюгового транспортера.
Ланцюговий транспортер це — машина неперервної дії для переміщення кускових або штучних вантажів, яка широко застосовується при механізації та автоматизації промислових процесів в різних галузях народного господарства.
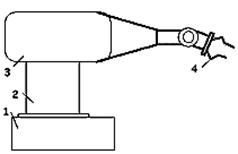
Ланцюговий транспортер (рис.1) виконаний у вигляді двох зірочок: ведучої 1 та веденої 2, через які перекинуто транспортерний ланцюг 3. Ведена зірочка має натяжний пристрій гвинтового типу 4. Тяговим та вантажонесучим органом у ланцюгового транспортера є ланцюг 3 та напрямлячі-опори 5, які розташовані як під верхньою, так і під нижньою гілками ланцюга. Швидкість руху ланцюга коливається від 1 до 8 м/с в залежності від виду транспортуємого вантажу та умов експлуатації.
Проектуємий електропривід буде передавати обертовий рух ведучій зірочці 1.
Транспортні пристрої забезпечують неперервність технологічних процесів, тому до них застосовують особливі вимоги по надійності та довговічності. У зв’язку з цим оптимальним приводом для ланцюгового транспортера буде електричний привід з асинхронним електродвигуном змінного струму, який має суттєву перевагу у порівнянні з іншими видами приводів (гідравлічним та пневматичним).
Приводи з асинхронними двигунами широко розповсюджені в робототехнічних та технологічних комплексах. Це пояснюється тим, що асинхронні двигуни мають просту конструкцію, надійні в експлуатації, дешевші, значно легші та менші за розмірами від електричних двигунів іншого типу.
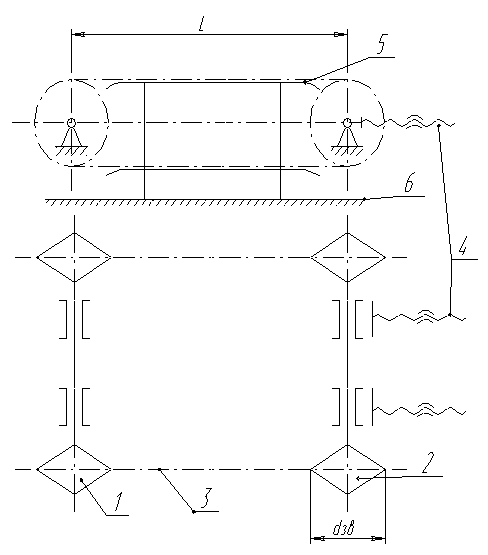 |
Рис. 1. Кінематична схема стрічкового транспортера:
1 — зірочка ведуча,
2 — зірочка ведена,
3 — ланцюг транспортний,
4 — пристрій натяжний,
5 — направляючі,
6 –– станина.
Враховуючи викладене вважаємо, що основною метою цього проекту є розробка такої конструкції передаточного механізму електроприводу, яка б відповідала всім вимогам, що ставляться в технічному завданні.
Для успішного вирішення поставленої задачі в проектуємому передаточному механізмі необхідно використати якомога більше число серійно виготовляємих складових частин, що мають гарантовану заводом-виробником надійність та довговічність.
1. Опис будови та принципу дії електроприводу
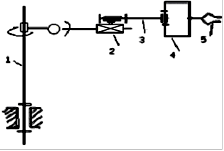
В результаті техніко-економічного аналізу (див. розділ 4) вибрано кінематичну схему розробляємого електроприводу (рис.2).
Електропривід включає двигун М, який за допомогою пружної втулочно-пальцевої муфти МУВП з’єднаний з вхідним валом черв’ячного редуктора Ч250. На вихідний вал черв’ячного редуктора насаджено зірочку Z1, яка за допомогою втулочно-роликового ланцюга Ц з’єднана з веденою зірочкою Z2, що закріплена на валу ведучої зірочки ланцюгового транспортера. Ланцюгова передача має натяжний ролик НР.
Електродвигун з черв’ячним редуктором змонтовані на окремій рамі, тобто виконані у вигляді самостійного блоку, який розташований під холостою гілкою стрічкового транспортера. Така компоновка електропривода відповідає принципам блочно-модульної побудови машин, дозволяє вписатися в габарити ланцюгового транспортера та дає можливість зручного обслуговування складових частин електропривода при експлуатації.
Технічна характеристика електропривода
1. Номінальний обертовий момент на вихідному валу, Нм —6180;
2. Частота обертання вихідного вала, об/хв — 17;
3. Електродвигун — АИР160S6У3, Р = 11,0 кВт, n = 970 об/хв;
4. Редуктор — Ч-250-50-19,4-51-У3, Твих = 4120 Нм при nб = 1000 об/хв;
5. Габаритні розміри, мм ![]() довжина —1312, ширина —648, висота —760;
довжина —1312, ширина —648, висота —760;
6. Маса, кг ~600.
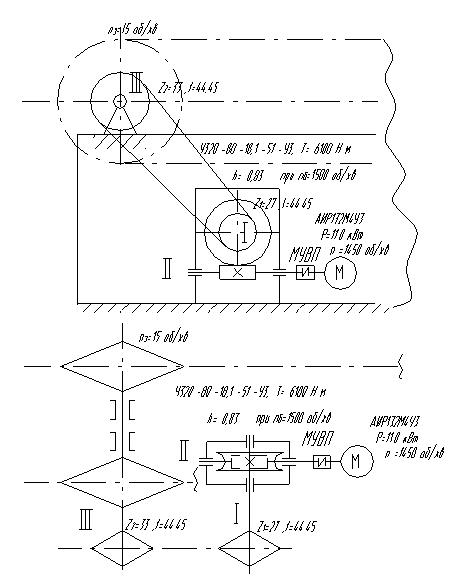 |
Рис.2. Кінематична схема електроприводу ланцюгового транспортера:
2. Попередній вибір електродвигуна
Визначаємо корисну потужність, яка необхідна для привода стрічкового транспортера, за формулою:
Ркор = Ткор![]() , (1)
, (1)
де Ткор — середній момент корисного опору на ведучому барабані за графіком навантаження, Нм;
![]() — кутова швидкість ведучої зірочки, с-1.
— кутова швидкість ведучої зірочки, с-1.
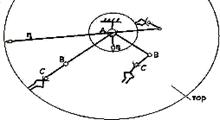
Враховуючи характер навантаження (див. рис. 2 в технічному завданні)
Ткор = (Тх 0,5t + 0,8Тх0,5 t)/(0,5 t +0,5 t)=0,9Т=0,9х3750=3375 Нм.
де Т — діючий момент корисного опору на ведучому барабані —3750 Нм, який заданий;
t — час дії навантаження, хв.
![]() = p n/30=pх 17/30=1,78 1/с.
= p n/30=pх 17/30=1,78 1/с.
де n — частота обертання ведучої зірочки 17 об/хв по завданню.
Підставивши отримані значення Ткор та ![]() в рівняння (1), отримаємо:
в рівняння (1), отримаємо:
Ркор = 3375 х1,78= 6007,5 Вт
Необхідну потужність елкктродвигуна визначаємо за формулою:
Рнеобх = к Ркор /![]() , (2)
, (2)
де к — коефіцієнт запасу, величина якого згідно даних [1] коливається від 1,1 до 1,2; приймаємо 1,1;
Ркор = 6007, 5 Вт;
![]() — коефіцієнт корисної дії передаточного механізму, склад якого невідомий; тому попередньо приймаємо
— коефіцієнт корисної дії передаточного механізму, склад якого невідомий; тому попередньо приймаємо ![]() = 0,7.
= 0,7.
Тоді
Рнеобх = 1,1 х6007,5 /0,7 = 9440,35 Вт
Номінальну потужність Рном встановлюємого електродвигуна визначаємо по каталогу [2] виходячи із співвідношення:
Рном ![]() Рнеобх
Рнеобх
Враховуючи, що електродвигуни змінного струму по масі на 50% легші та вимагають в 4,5 рази менших витрат міді у порівнянні з електродвигунами постійного струму [2], мають більш високу ступінь захисту, а також у зв’язку з умовами роботи стрічкового транспортера та вимогами технічного завдання, в проектуємому електроприводі орієнтуємося на застосування трифазних асинхронних електродвигунів змінного струму з короткозамкнутим ротором, як найбільш простих, надійних та дешевих.
В електроприводі, що ми проектуємо можуть бути використані асинхронні електродвигуни, технічні показники яких наведені в таблиці 1.
Таблиця 1.Технічні показники електродвигунів, що призначені для використання в електроприводі.
| Марка і тип | Р, кВт | n, об/хв | Маса кг | L B H,мм | db, мм | lb, мм | Тпуск Тном | Тмакс Тном | mD2, кг м2 |
|
| АИР132М4У3 | 11,0 | 1450 | 83,5 | 538 302 350 | 38 | 80 | 2 | 2,2 | 0,04 | 0,875 |
| АИР160S6У3 | 11,0 | 970 | 100 | 624 358 430 | 48 | 110 | 2 | 2,7 | 0,12 | 0,88 |
Р — номінальна потужність двигуна,
n — асинхронна частота обертання вала,
L, B, H — довжина, ширина та висота двигуна,
db — приєднувальний діаметр вала,
lb — довжина приєднувальної частини вала,
Тпуск/Тном і Тмакс/Тном — відношення пускового та максимального моментів до номінального моменту, що розвиває двигун,
m D2 — маховий момент ротора двигуна,
![]() — коефіцієнт корисної дії.
— коефіцієнт корисної дії.
Похожие работы
... ,однак для нього характерні суттєві обмеження. Цей метод не потребує застосування універсальних обчислювальних машин, тому він був широко розповсюджений на протязі ряду років, доки введення обчислювальних засобів в промислові роботи настало економічно оправданим. Обмеження цього методу пов’язані з неможливістю використання давачів. Користувач визначає послідовність дій роботів, яка не може мі ...



... коштів є важливим чинником у зниженні собівартості продукції чи виконаної роботи. Раціональне використання оборотних коштів залежить від правильного їхнього формування і ефективної організації виробництва. Зосередження н підприємствах зайвих оборотних коштів приводить до їхнього заморожування. Це завдає шкоди економіці господарства. Щоб уникнути такого положення, оборотні кошти нормуються, що є ...
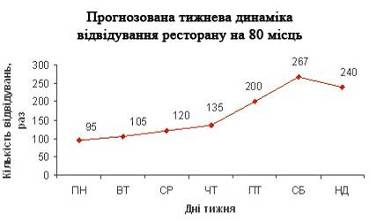
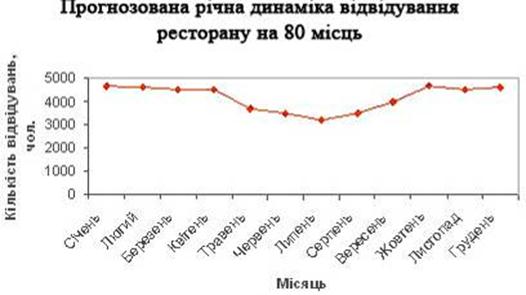
... Чарка, стакан 4 320 2 80 400 Столові прибори (комплект) 4 320 2 80 400 Далі наведемо характеристику посуду, який будуть використовувати в комплексному закладі ресторанного господарства (табл. 2.8–2.11). Таблиця 2.8. Характеристика та призначення класичного вітчизняного порцелянового та фаянсового посуду Найменування Розміри, мм Місткість, см3, порцій Призначення ...
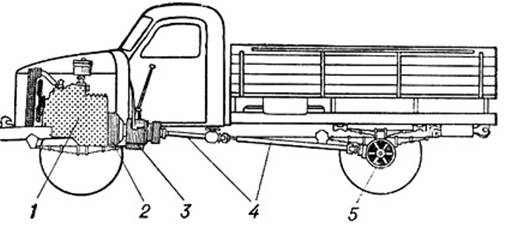
... , від диференціала до правого і лівого провідним колесам. Рис. 1. Трансмісія автомобіля: 1 – двигун; 2 – зчеплення; 3 – коробка передач; 4 – карданна передача; 5 – головна передача і диференціал. 2. Технічне обслуговування трансмісії Передача моменту, що крутить, від двигуна до провідних коліс автомобіля повинна відбуватися плавно, без ривків. На всіх швидкостях руху як при передачі ...
0 комментариев