Навигация
Конструкция и принцип действия гировертикали
25704
знака
1
таблица
8
изображений
Содержание
Введение
1. Теоретическая часть
1.1 Обзор научно технической и патентной литературы
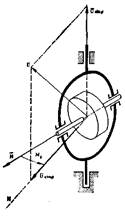
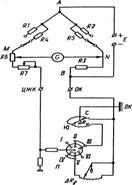
1.2 Описание конструкции и принципа действия
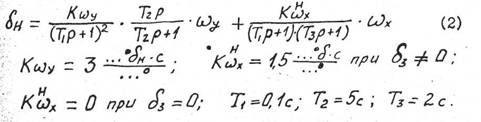
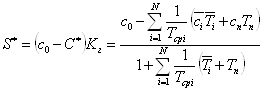
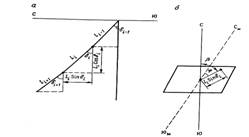
1.3 Уравнения движения гировертикали
2. Расчетная часть
2.1 Выбор типа гиродвигателя
2.2 Габаритные размеры
2.3 Расчет массы и момента инерции вращающихся частей
2.4Расчет максимального момента
2.5 Определение основных параметров гиромотора
2.6 Индукция в воздушном зазоре
2.7 Обмоточные данные статора
2.8 Расчет магнитной цепи
2.9 Параметры схемы замещения
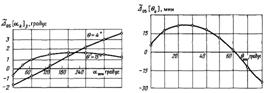
2.10 Механическая характеристика
2.11 Уточнение кинетического момента. Расчет времени разбега
Заключение
Список использованной литературы
Приложение
Введение
Гироскопические вертикали (гировертикали) предназначены для определения направления истинной вертикали на движущихся объектах. Являясь одним из приборов системы ориентации подвижного объекта, они применяются как датчики углов крепа и тангажа летательного аппарата (или датчики аналогичных углов па других движущихся объектах) и служат для создания на движущемся объекте площадки, стабилизированной в плоскости горизонта.
Снимаемые с измерительных осей прибора электрические сигналы используются в пилотажных, навигационных, радиолокационных системах, визуальных указателях и т. п.
Гироскопические приборы, применяемые непосредственно для визуального определения положения самолета относительно плоскости горизонта, называют авиагоризонтами. На неподвижном относительно Земли основании направление истинной вертикали можно определить, например, с помощью короткопериодического физического маятника или уровня. Однако плечо короткопериодического маятника, установленного на движущемся объекте, отклоняется к направлению кажущейся вертикали.
При некоторых эволюциях самолета (вираж, петля) погрешности такого маятника практически могут достигать нескольких десятков градусов и более. Поэтому он непригоден для непосредственного определения и задания направления истинной вертикали.
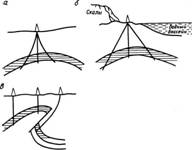
В отличие от маятника астатический гироскоп менее подвержен действию ускорений и сохраняет неизменным направление главной оси в инерциальном пространстве. Если главную ось астатического гироскопа установить по направлению истинной вертикали, то с течением времени она отклонится от вертикали вследствие суточного вращения Земли и перемещения объекта относительно нее. Кроме того, гироскоп не свободен от моментов сопротивления в осях подвеса, которые вызывают его прецессию от первоначального положения. Такой гироскоп может использоваться в качестве гировертикали лишь ограниченное время. Для придании ему избирательности к направлению истинной вертикали используется физический маятник, который, либо непосредственно действует на гироскоп за счет смещения центра масс последнего (гиромаятник), либо используется как чувствительный элемент, управляющий прецессией гироскопа и осуществляющий его коррекцию.
Гировертикали, сочетающие астатический гироскоп с коррекцией от маятникового чувствительного элемента, позволяют создать динамическую систему, обладающую избирательностью маятника и безынерционпостью прецессии гироскопа, достаточно низкочастотную, и, следовательно, менее подверженную действию кратковременных либо быстро меняющихся ускорений, чем физический маятник, используемый отдельно. Такие схемы построения гировертикали получили широкое распространение. Объектом исследования является гировертикаль.
Цель работы: изучить конструкцию и принцип действия гировертикали, рассчитать основные параметры гиромотора, применяемого в данном устройстве.
Описывается конструкция, принцип действия и уравнения движения. Проведен расчет основных параметров гиромотора, используемого в данном устройстве.
В процессе выполнения курсовой работы использовались современные программные средства такие, как "Компас 3D V11".
1. Теоретическая часть
1.1 Обзор научно-технической и патентной литературыОбзор был проведен для России. Результат патентного поиска приведен в таблице 1.
Таблица 1. Тенденция развития данного вида техники.
| Основные тенденции развития | Источники информации, подтверждающие тенденции и направление поиска | Формула изобретения |
| Устройство стабилизации, ускоренного восстановления и контроля силовой гироскопической вертикали | Номер патента:72934 Класс(ы) патента:G01C19/54 Номер заявки: 2000108294/28 Дата подачи заявки: 03.04.2000 Дата публикации: 27.08.2001 Заявитель(и):Казанский государственный технический университет им. А.Н. Туполева Автор(ы):Белаид М.М.; Кривошеев С.В.; Огородникова Н.Н. Патентообладатель(и): Казанский государственный технический университет им. А.Н. Туполева | Изобретение предназначено для быстрого приведения платформы силовой гировертикали в плоскость местного горизонта и для контроля исправной работы контуров силовой стабилизации. Устройство содержит узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления, содержащий два идентичных контура, каждый из которых состоит из параллельно включенных компараторов, выходы которых подключены на входы суммирующего усилителя, на вход которого подключен предварительный усилитель датчика углов гироскопа поперечной (продольной) коррекции. Навходыкомпараторовподключенымаятниковые чувствительные элементы Выход суммирующего усилителя соединен через усилитель мощности со стабилизирующим мотором. Контроль работоспособности контуров стабилизации осуществляет узел логического контроля, состоящий из четырех компараторов, соединенных с четырехвходовым элементом ИЛИ, который подключен к аналоговому коммутатору ОТКАЗ непосредственно и к аналоговому коммутатору ИСПРАВНОСТЬ - через логический элемент НЕ, по сигналам предварительных усилителей, соединенных со входами соответствующих компараторов. Управляет работой задатчик, обеспеч. два режима работы: ускоренного восстановления с блокировкой работы узла логического контроля и силовой стабилизации с автоматическим контролем работы контуров силовой стабилизации. Устройство повышает надежность и точность работы систем стабилизации, ускоренного восстановления и контроля. 1 з.п.ф-лы, 3 ил. |
| Устройство коррекции гировертикали | Номер патента: 2145057 Класс(ы) патента: G01C19/54 Номер заявки: 98114891/28 Дата подачи заявки: 21.07.1998 Дата публикации: 27.01.2000 Заявитель(и): Казанский государственный технический университет им.А.Н.Туполева; Авиационный научно-технический центр "Авионика" Автор(ы): Кривошеев С.В.; Терехова Е.В.; Чарышев Ш.Ф. Патентообладатель(и): Казанский государственный технический университет им.А.Н.Туполева; Авиационный научно-технический центр "Авионика" | Устройство предназначено для использования в гироскопической технике. Устройство содержит выключатели продольной и поперечной коррекции, вычислительное устройство, коррекционные моторы, задатчик ускоренного восстановления. Два управляемых коммутатора по сигналам маятниковых чувствительных элементов, выключателей коррекции и блока реверса управляют приводными двигателями. Третий управляемый коммутатор по сигналам чувствительных элементов и задатчика управляет коррекционными моторами. Обеспечивается повышение точности гировертикали за счет использования моментов сил сухого трения трехколечных шарикоподшипников и вращающихся коллекторных токоподводов для коррекции. 2 ил. |
| Способ измерения углов поворота движущегося с ускорением аппарата с помощью гировертикали и устройство для его осуществления | Номер патента:38017 Класс(ы) патента:G01C19/44 Номер заявки:115438/28 Дата подачи заявки:.08.1998 Дата публикации:.09.1999 Заявитель(и):Тульский государственный университет Автор(ы):Распопов В.Я.; Горин В.И.; Анисимова Н.А.; Горин А.А. Патентообладатель(и):Тульский государственный университет | Способ и устройство предназначены для определения истинной вертикали на движущихся или неподвижных объектах. Устройство предназначено для использования в качестве датчиков крена и тангажа летательных аппаратов. Накладывают ограничения на степени свободы гироскопической системы. Обнуляют ее кинетический момент. Одновременно подсоединяют физический маятник к карданову подвесу. Гироскопическую систему приводят посредством физического маятника к вертикали на участке траектории без ускорений. Перед началом движения аппарата с ускорением снимают ограничения на степени свободы гироскопической системы. Востанавливают ее кинетический момент и одновременно отсоединяют маятниковость. Получают информацию об угловом положении аппарата с датчиков угла. Внутренняя рама выполнена в виде полого цилиндра с вертикальной осью. Внутри цилиндра установлены друг над другом два трехстепеных гироскопа, у которых векторы кинетических моментов направлены встречно по вертикали. Оси кардановых подвесов расположены ортогонально друг к другу. Кожухи гироскопов соединены шарниром. На верхнем торце цилиндра размещен якорь соленоидного электромагнита, корпус которого имеет возможность перемещения в сторону кожуха гироскопа. На нижнем торце цилиндра установлен соосно с ним колпак в виде сферической оболочки с центром, совпадающим с центром подвеса устройства. На корпусе под сферическим колпаком установлен второй электромагнит. Обеспечивается уменьшение времени приведения к вертикали, повышение точности и надежности измерений, уменьшение габаритов. 2 с. п. ф-лы, 1 ил. |
| Гировертикаль | Frederick D. Braddon, Babylon, N.Y., Assignor to The Sperry Corporation, a corporation of Delaware Application July 21.1947. Serial No. 762,294 | Это изобретение касается гировертикалей. Объект изобретения состоит в том, чтобы обеспечить подобный прибор, приспособленный, включать стабилизирующуюся платформу. Особенность изобретения состоит в расположении незначительной оси рамки ротора прибора, располагаемого на главной оси рамки. Дальнейшая особенность Изобретения состоит в предоставлении установки для того, чтобы поддержать ротор гироскопа,расположенным вертикально, чтобы вращатьсяотносительно оси перпендикулярной к вертикальному самолету. Другая особенность обеспечена связями механизма между рамой ротора и подвижными элементами. |
Похожие работы
... выполнении авиационных гироскопических указателей поворотов, на рис.21 показана одна из современных моделей прибора с питанием от постоянного электрического тока напряжением 27 в. 7.4. Авиационный гироскоп направления Несмотря на то, что гироскопический указатель поворотов позволяет выдерживать прямолинейный полет и совершать правильные развороты самолета, пользование одним этим прибором ...
... средств является неприемлемой, т.к. жёсткая конкуренция на рынке транспортных услуг требует сокращения времени технического обслуживания до минимума. Скорость и надёжность проверки, во многом зависит от «человеческого фактора». Поэтому проверка функционирования системы улучшения устойчивости самолёта является довольно длительным, трудоёмким процессом, что приводит к лишним затратам труда и ...
... частот вибраций и ускорений, возникающих на современных самолетах, выдерживают ударные перегрузки до 4g с частотой 40-100 ударов в 1 мин. Ниже приведены основные технические данные курсовой системы ТКС-П2. Допустимый уход гироскопов в режиме ГПК в нормальных условиях полета в широтах, отличающихся от широты последней балансировки гироузлов: менее ±20° …..………………………….…………………………. ±0,5°/ч ...
... вращении сохраняет заданное направление оси в пространстве. Датчиком угле искривления служит отвес. Измерения выполняют непрерывно по 6 стволу скважины. Приборами, в которых датчиком азимута служит буссоль, измерения азимута можно проводить только в открытом стволе скважины Гироскопические инклинометры позволяют измерять азимут в скважинах, обсаженных металлической колонной, а также в разрезах, в ...
0 комментариев