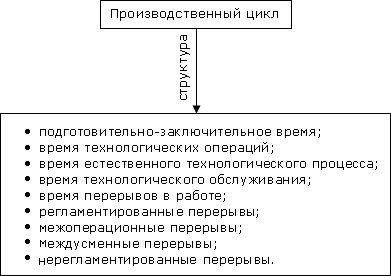
Июля 1963г. была получена первая партия Казанского фенола и ацетона
Описание технологического процесса
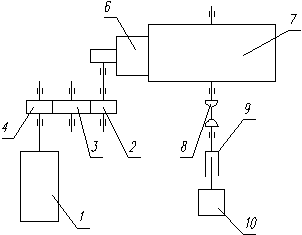
Загрузчик ЗГВ - 500
Тянущее устройство
Датчики тока и скорости
УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ
Выбор тиристоров
Регулировочная характеристика преобразователя
Система импульсно-фазного управления (СИФУ) с входным устройством
СИНТЕЗ ЗАМКНУТОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА ЭКСТРУДЕРА
Оптимизация контура регулирования тока
Оптимизация контура регулирования скорости
Расчет статической характеристики
Расчет переходного процесса
РАСЧЕТ НЕУПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ ДЛЯ ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ
Расчет и выбор диодов
БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ ПРОЕКТА
Определение категории помещения
Шум и вибрация
Вентиляция, отопление
Расчет искусственного освещения
Расчёт заземлителей
Технологическая безопасность
Расчет основных фондов, капитальных затрат на оборудование и амортизационных отчислений
Дополнительный фонд заработной платы (10% от основного ФЗП)
Расчет расходов на содержание и эксплуатацию оборудования
Электроэнергия на технологические цели
Расчет экономической эффективности
Навигация
Оптимизация контура регулирования скорости
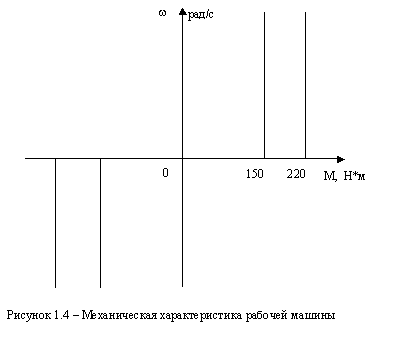
Разработка электроприводов прессовых машин
117101
знак
28
таблиц
3
изображения
7.3 Оптимизация контура регулирования скорости
Объектом регулирования внешнего контура скорости является замкнутый контур тока и звено, описывающее механическое сопротивление двигателя.
Контур замыкается безинерционной обратной связью по скорости с коэффициентом преобразования ![]() [11].
[11].
Рассмотрим работу замкнутой системы тиристорный преобразователь - двигатель (ТП - Д) с отрицательной обратной связью по скорости ДПТ НВ (рисунок 7.1).
На валу ДПТ НВ - М1 находится датчик скорости - тахогенератор ВR1,
выходное напряжение которого пропорционально частоте вращения ДПТ
![]() (7.31)
(7.31)
Коэффициент пропорциональности ![]() называется коэффициентом обратной связи по скорости[10]. Сигнал обратной связи:
называется коэффициентом обратной связи по скорости[10]. Сигнал обратной связи:
![]() (7.32)
(7.32)
Сравнивается с задающим сигналом скорости ![]() , и их разность в виде сигнала рассогласовывания (ошибки регулирования скорости)
, и их разность в виде сигнала рассогласовывания (ошибки регулирования скорости) ![]() подается на вход операционного усилителя DA1 являющегося РС, который с коэффициентом усиления
подается на вход операционного усилителя DA1 являющегося РС, который с коэффициентом усиления ![]() усиливает сигнал рассогласовывания
усиливает сигнал рассогласовывания ![]() и подает его в виде сигнала управления
и подает его в виде сигнала управления ![]() на вход РТ.
на вход РТ.
Запишем выражения для сигнала рассогласовывания и выходного сигнала РС:
![]() (7.33)
(7.33)
![]() (7.34)
(7.34)
![]() (7.35)
(7.35)
где ![]() и
и ![]() соответственно ЭДС и коэффициент усиления преобразователя.
соответственно ЭДС и коэффициент усиления преобразователя.
Рассмотрим физическую сторону процесса регулирования скорости в данной системе. Предположим, что ДПТ работает под нагрузкой в установившемся режиме и по каким-то причинам увеличился момент нагрузки ![]() Так как развиваемый ДПТ момент становится меньше момента нагрузки, его скорость начинает снижаться и соответственно будет снижаться сигнал обратной связи по скорости
Так как развиваемый ДПТ момент становится меньше момента нагрузки, его скорость начинает снижаться и соответственно будет снижаться сигнал обратной связи по скорости ![]() , что в свою очередь согласно вызовет увеличение сигналов рассогласования
, что в свою очередь согласно вызовет увеличение сигналов рассогласования ![]() и управления
и управления ![]() и приведет к повышению ЭДС преобразователя, а следовательно напряжения и скорости ДПТ. При уменьшении момента нагрузки обратная связь будет действовать в другом направлении, приводя к снижению ЭДС преобразователя [10] .
и приведет к повышению ЭДС преобразователя, а следовательно напряжения и скорости ДПТ. При уменьшении момента нагрузки обратная связь будет действовать в другом направлении, приводя к снижению ЭДС преобразователя [10] .
В цепи обратной связи операционного усилителя DА1 установлен резистор R2, что позволяет реализовать пропорциональный регулятор скорости.
В схеме, приведенной на рисунке 7.1, в цепь обратной связи РС DA1 включены стабилитроны VD1-VD2, которые ограничивают сигнал на выходе РС, то есть обеспечивает ограничение тока и момента двигателя.
Перейдем к расчету параметров регулятора скорости. Замыканием цепи обратной связи по скорости и введением в цепь управления регулятора скорости с передаточной функцией ![]() получаем второй контур регулирования, структурная схема которого представлена на рисунке 7.2. В прямой цепи этого контура представлена передаточная функция замкнутого оптимизированного контура тока
получаем второй контур регулирования, структурная схема которого представлена на рисунке 7.2. В прямой цепи этого контура представлена передаточная функция замкнутого оптимизированного контура тока ![]() Без учета внутренней связи по ЭДС двигателя она имеет вид:
Без учета внутренней связи по ЭДС двигателя она имеет вид:
![]() (7.36)
(7.36)
Передаточную функцию объекта регулирования скорости:
![]() (7.37)
(7.37)
Желаемая передаточная функция разомкнутого контура скорости:
![]() (7.38)
(7.38)
Передаточная функция регулятора скорости имеет вид:
![]()
![]() (7.39)
(7.39)
где ![]()
Отсюда видно, что требуется пропорционально-интегральный регулятор скорости, с постоянной интегрирования:
![]() (7.40)
(7.40)
Вычислим коэффициент усиления регулятора скорости при ![]()
![]() (7.41)
(7.41)
Определим величину коэффициента передачи по моменту:
![]() (7.42)
(7.42)
![]() (7.43)
(7.43)
Определим модуль статической жесткости естественной характеристики:
![]() (7.44)
(7.44)
![]() (7.45)
(7.45)
Определим коэффициент обратной связи по скорости:
![]() , В
, В![]() с (7.46)
с (7.46)
где ![]() –максимальный задающий сигнал
–максимальный задающий сигнал
![]() -максимальная скорость идеального холостого хода (); Тогда
-максимальная скорость идеального холостого хода (); Тогда
![]() (7.47)
(7.47)
Отсюда
![]() (7.48)
(7.48)
Задавшись сопротивлением ![]() , в качестве резистора
, в качестве резистора ![]() выбираем резистор типа МЛТ-0,25-100кОм
выбираем резистор типа МЛТ-0,25-100кОм![]() [9], определим сопротивление
[9], определим сопротивление ![]() :
:
![]() (7.49)
(7.49)
![]() (7.50)
(7.50)
![]() (7.51)
(7.51)
В качестве резистора ![]() выбираем резистор типа МЛТ-0,5-400кОм
выбираем резистор типа МЛТ-0,5-400кОм![]()
Регулятор скорости строим на базе операционного усилителя К553УД1А, с параметрами [9]:
-напряжение питания ![]()
-минимальный коэффициент усиления ![]()
Потребляемый ток ![]()
Определим ЭДС тахогенератора при ![]()
![]() (7.52)
(7.52)
![]() (7.53)
(7.53)
![]() (7.54)
(7.54)
Рассчитаем сопротивление ![]()
![]() (7.55)
(7.55)
![]() (7.56)
(7.56)
В качестве резистора ![]() выбираем резистор типа МЛТ-0,5-210кОм
выбираем резистор типа МЛТ-0,5-210кОм![]() Стабилитроны VD1 и VD2 в цепи обратной связи РС, включенные для ограничения его выходного напряжения, должны быть выбраны на напряжение:
Стабилитроны VD1 и VD2 в цепи обратной связи РС, включенные для ограничения его выходного напряжения, должны быть выбраны на напряжение:
![]() (7.57)
(7.57)
Выбираем по справочнику [9] стабилитрон КС5102А, ![]()
![]() (7.58)
(7.58)
где ![]() –напряжение ограничения регулятора скорости.
–напряжение ограничения регулятора скорости.
Похожие работы
... быть как можно проще и надежнее. В связи с этим привода кузнечно-прессовых машин запитываются от стандартной промышленной сети на 380 В, 3 фазы, частота 50 Гц. В прессе не требуется сложная система управления электроприводом пресса, достаточно включать и выключать его, так как управление прессом производится за счет управления кинематическими цепями пресса. 3. Выбор принципиальных решений ...

... , если же выполнено любое из условий 1, 3, 4, то будут выполнены и другие из этих условий (хотя ВНД проекта может и не существовать). Глава 2. Анализ возможности расширения производства на примере ООО «Санфлор» 2.1 Общая характеристика предприятия Общество с ограниченной ответственностью «Санфлор» действует в соответствии с законодательством РФ, Уставом и внутренними документами общества. ...
... ) при запуске в серийное производство контейнеров с оборудованием. Все это ведет к снижению сроков и затрат на подготовку производства. 5Автоматизированное проектирование деталей крыла В настоящем разделе проекта рассматривается автоматизированное проектирование деталей и узлов с целью увязки конструкции и подготовки информации для изготовления шаблонов, технологической оснастки и самих деталей. ...
... осуществлять трудовую деятельность более эффективно, творчески, а также способствует выходу личности на новые уровни своего развития. 1.2 Педагогические подходы к реализации программы профессиональной подготовки заливщиков металла Учебные занятия, как правило, проводятся в виде лекций, консультаций, семинаров, практических занятий, лабораторных работ, контрольных и самостоятельных работ, ...
0 комментариев