Июля 1963г. была получена первая партия Казанского фенола и ацетона
Описание технологического процесса
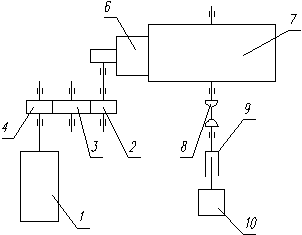
Загрузчик ЗГВ - 500
Тянущее устройство
Датчики тока и скорости
УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ
Выбор тиристоров
Регулировочная характеристика преобразователя
Система импульсно-фазного управления (СИФУ) с входным устройством
СИНТЕЗ ЗАМКНУТОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА ЭКСТРУДЕРА
Оптимизация контура регулирования тока
Оптимизация контура регулирования скорости
Расчет статической характеристики
Расчет переходного процесса
РАСЧЕТ НЕУПРАВЛЯЕМОГО ВЫПРЯМИТЕЛЯ ДЛЯ ПИТАНИЯ ОБМОТКИ ВОЗБУЖДЕНИЯ
Расчет и выбор диодов
БЕЗОПАСНОСТЬ И ЭКОЛОГИЧНОСТЬ ПРОЕКТА
Определение категории помещения
Шум и вибрация
Вентиляция, отопление
Расчет искусственного освещения
Расчёт заземлителей
Технологическая безопасность
Расчет основных фондов, капитальных затрат на оборудование и амортизационных отчислений
Дополнительный фонд заработной платы (10% от основного ФЗП)
Расчет расходов на содержание и эксплуатацию оборудования
Электроэнергия на технологические цели
Расчет экономической эффективности
Навигация
Датчики тока и скорости
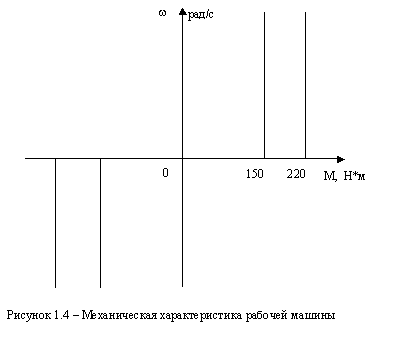
Разработка электроприводов прессовых машин
117101
знак
28
таблиц
3
изображения
4.3 Датчики тока и скорости
Наибольшее распространение в регулируемом электроприводе имеют датчики тока и скорости, необходимые для формирования замкнутых контуров в системе регулирования.
Известны две основные системы образования токовой обратной связи: по переменному току на первичной обмотке трансформатора и по постоянному току цепи якоря двигателя. В данной работе используем второй способ. В этом случае измеренное напряжение снимается с шунта, включенного в цепь якоря двигателя. При этом отпадает необходимость в выпрямлении напряжения, однако чувствительность схемы невелика. Номинальное напряжение, снимаемое с шунта, составляет 0,075 или 0,1 В и нуждается в последующем усилении.
![]() (4.17)
(4.17)
![]() (4.18)
(4.18)
![]() Ом (4.19)
Ом (4.19)
где ![]() -напряжение, снимаемое с шунта,
-напряжение, снимаемое с шунта, ![]() В;
В;
![]() -ток якоря электродвигателя
-ток якоря электродвигателя
Данное устройство является стандартным, поэтому с учетом номинального значения тока якоря выбираем шунт типа: номинальный ток которого А, номинальное падение напряжения 75 мВ, класс точности
Определим коэффициент шунта:
![]() (4.20)
(4.20)
![]() (4.21)
(4.21)
Выходное напряжение подается на дополнительный усилитель и специальное устройство, которое осуществляет гальваническую развязку силовой цепи от системы управления.
Самым распространённым датчиком обратной связи по скорости в регулируемом электроприводе является тахогенератор. Обратная связь по скорости необходима для создания широкорегулируемого электропривода, поскольку статизм разомкнутой электромеханической системы имеет недопустимо большое значение в нижнем диапазоне регулирования.
Однородность тока тахогенератора и двигателя создаёт определённые удобства при эксплуатации привода, поэтому в подавляющем большинстве случаев применяют тахогенераторы постоянного тока. Стремление уменьшить обратные пульсации требует встройки тахогенератора в двигатель и установки его на якорь электродвигателя. В современных моделях используют тахогенераторы с возбуждением от постоянных магнитов.
Передаточная функция тахогенератора соответствует инерционному звену первого порядка:
![]() (4.22)
(4.22)
где ![]() -коэффициент усиления тахогенератора;
-коэффициент усиления тахогенератора;
![]() -постоянная времени тахогенератора.
-постоянная времени тахогенератора.
Однако постоянная времени тахогенератора невелика (![]() с) и часто в расчетах подобной величиной пренебрегают. В этом случае тахогенератор представляется безинерционным звеном с передаточной функцией:
с) и часто в расчетах подобной величиной пренебрегают. В этом случае тахогенератор представляется безинерционным звеном с передаточной функцией:
![]() , (4.23)
, (4.23)
Величину коэффициента усиления тахогенератора можно определить по следующей формуле:
![]() (4.24)
(4.24)
где ![]() -номинальное напряжение на якоре тахогенератора;
-номинальное напряжение на якоре тахогенератора;
![]() -номинальная скорость тахогенератора
-номинальная скорость тахогенератора
![]() (4.25)
(4.25)
![]() об/мин
об/мин
Двигатель имеет тахогенератор типа ТС-1, с закрытым встроенным исполнением. Возбуждение тахогенератора от постоянных магнитов. Крутизна напряжения 0,033 ![]() , нагрузочное сопротивление не менее 2 кОм. Допустимые кратковременные перегрузки по току при номинальном потоке возбуждения:
, нагрузочное сопротивление не менее 2 кОм. Допустимые кратковременные перегрузки по току при номинальном потоке возбуждения:
![]() в течении 60 секунд,
в течении 60 секунд,
![]() в течении 10 секунд.
в течении 10 секунд.
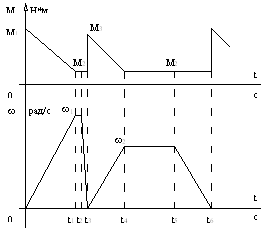
4.4 Время разгона двигателя
Найдем момент инерции шнека:
![]() (4.23)
(4.23)
где d-диаметр шнека (d=0,9 м);
l-длина шнека (l=2,7 м);
![]() -плотность стали (
-плотность стали (![]() );
);
i-передаточное число редуктора (i=16)
![]() (4.24)
(4.24)
Суммарный момент инерции на валу двигателя:
![]() (4.25)
(4.25)
где ![]() –момент инерции двигателя (
–момент инерции двигателя (![]() );
);
![]() (4.26)
(4.26)
Время разгона двигателя найдем по формуле:
![]() (4.27)
(4.27)
![]() с
с
где ![]() –дополнительный момент при пуске;
–дополнительный момент при пуске;
![]() -момент на валу двигателя (
-момент на валу двигателя (![]() ).
).
Дополнительный момент при пуске:
![]() , (4.28)
, (4.28)
где ![]() –коэффициент перегрузочной способности электродвигателя (
–коэффициент перегрузочной способности электродвигателя (![]() )
)
![]() (4.29)
(4.29)
Таким образом, нормальное время разгона системы до номинальной скорости составляет 8, 89 с.
Похожие работы
... быть как можно проще и надежнее. В связи с этим привода кузнечно-прессовых машин запитываются от стандартной промышленной сети на 380 В, 3 фазы, частота 50 Гц. В прессе не требуется сложная система управления электроприводом пресса, достаточно включать и выключать его, так как управление прессом производится за счет управления кинематическими цепями пресса. 3. Выбор принципиальных решений ...

... , если же выполнено любое из условий 1, 3, 4, то будут выполнены и другие из этих условий (хотя ВНД проекта может и не существовать). Глава 2. Анализ возможности расширения производства на примере ООО «Санфлор» 2.1 Общая характеристика предприятия Общество с ограниченной ответственностью «Санфлор» действует в соответствии с законодательством РФ, Уставом и внутренними документами общества. ...
... ) при запуске в серийное производство контейнеров с оборудованием. Все это ведет к снижению сроков и затрат на подготовку производства. 5Автоматизированное проектирование деталей крыла В настоящем разделе проекта рассматривается автоматизированное проектирование деталей и узлов с целью увязки конструкции и подготовки информации для изготовления шаблонов, технологической оснастки и самих деталей. ...
... осуществлять трудовую деятельность более эффективно, творчески, а также способствует выходу личности на новые уровни своего развития. 1.2 Педагогические подходы к реализации программы профессиональной подготовки заливщиков металла Учебные занятия, как правило, проводятся в виде лекций, консультаций, семинаров, практических занятий, лабораторных работ, контрольных и самостоятельных работ, ...
0 комментариев