Навигация
Геометрическая интерпретация задачи линейного программирования
19812
знаков
2
таблицы
9
изображений
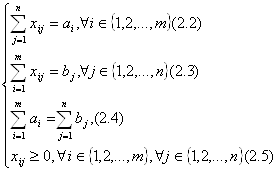
1.2 Геометрическая интерпретация задачи линейного программирования.
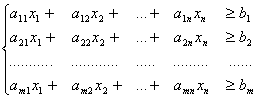
Рассмотрим задачу линейного программирования, система ограничений которой задана в виде неравенств.
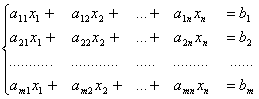
Найти минимальное значение линейной функции(1.5) Z = С1х1+С2х2+... +СNxN
при ограничениях
a11x1 + a22x2 + ... + a1NХN b1
a21x1 + a22x2 + ... + a2NХN b2
(1.6) . . . . . . . . . . . . . . .
aM1x1 + aM2x2 + ... + aMNХN bM
(1.7) xj 0 (j = 1, 2, ... ,n)
Совокупность чисел х1, х2, ..., хN, удовлетворяющих ограничениям (1.6) и (1.7), называется решением. Если система неравенств (1.6) при условии (1.7) имеет хотя бы одно решение, она называется совместной, в противном случае - несовместной.
Рассмотрим на плоскости х1Ох2 совместную систему линейных неравенств
a11x1 + a22x2 b1
a21x1 + a22x2 b2
. . . . . . . .
aM1x1 + aM2x2 bM
x1 0, x2 0
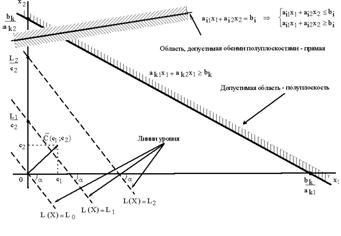
Это все равно, что в системе (1.6) - (1.7) положить N=2. Каждое неравенство этой системы геометрически определяет полуплоскость с граничной прямой
 ai1x1 + ai2x2 = bi ,(i = 1, 2, ..., m). Условия неотрицательности определяют полуплоскости соответственно с граничными прямыми х = 0, х = 0. Система совместна, поэтому полуплоскости, как выпуклые множества, пересекаясь, образуют общую часть, которая является выпуклым множеством и представляет собой совокупность точек, координаты каждой из которых являются решением данной системы (рис. 1.1).
ai1x1 + ai2x2 = bi ,(i = 1, 2, ..., m). Условия неотрицательности определяют полуплоскости соответственно с граничными прямыми х = 0, х = 0. Система совместна, поэтому полуплоскости, как выпуклые множества, пересекаясь, образуют общую часть, которая является выпуклым множеством и представляет собой совокупность точек, координаты каждой из которых являются решением данной системы (рис. 1.1).
Совокупность этих точек (решений) назовем многоугольником решений. Он может быть точкой, отрезком, лучом, много-угольником, неограничен-ной многоугольной облас-тью.
Если в системе ограничений (1.6) - (1.7) n = 3, то каждое нера-венство геометрически представляет полупространство трехмерного пространства, граничная плоскость которого ai1x1 + ai2x2 + ai3x3 = bi ,(i = 1, 2, ..., n), а условия неотрицательности – полупрост-ранства с граничными плоскостями соответственно хj = 0 (j = 1, 2, 3). Если система ограничений совместна, то эти полупространства, как выпуклые множества, пересекаясь, образуют в трехмерном пространстве общую часть, которая называется многогранником решений. Многогранник решений может быть точкой, отрезком, лучом, многоугольником, многогранником, многогранной неограниченной областью. Пусть в системе ограничений (1.6) - (1.7) n 3; тогда каждое неравенство определяет полупространство n-мерного пространства с граничной гиперплоскостью ai1x1 + ai2x2 + aiNxN = bi (i = 1, 2, ..., m), а условия неотрицательности – полупространства с граничными гиперплоскостями хj 0 (j = 1, 2, ..., n).
Если система ограничений совместна, то по аналогии с трехмерным пространством она образует общую часть n-мерного пространства, называемую многогранником решений, так как координаты каждой его точки являются решением.
Таким образом, геометрически задача линейного программирования представляет собой отыскание такой точки многогранника решений, координаты которой доставляют линейной функции минимальное значение, причем допустимыми решениями служат все точки многогранника решений.
2. Графический метод решения
задачи линейного программирования.
2.1. Область применения.
Графический метод основан на геометрической интерпретации задачи линейного программирования и применяется в основном при решении задач двумерного пространства и только некоторых задач трехмерного простран6тва, так как довольно трудно построить многогранник решений, который образуется в результате пересечения полупространств. Задачу пространства размерности больше трех изобразить графически вообще невозможно.
Пусть задача линейного программирования задана в двумерном пространстве, т. е. ограничения содержат две переменные.
Найти минимальное значение функции(2.1) Z = С1х1+С2х2
при
a11x1 + a22x2 b1
(2.2) a21x1 + a22x2 b2
. . . . . . . .
aM1x1 + aM2x2 bM
(2.3) х1 0, х2 0
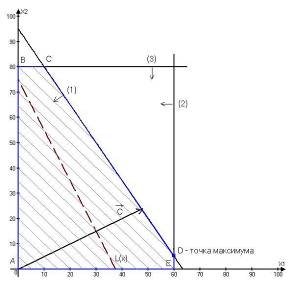
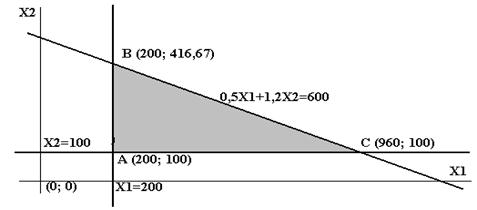
Допустим, что система (2.2) при условии (2.3) совместна и ее многоугольник решений ограничен. Каждое из неравенств (2.2) и (2.3), как отмечалось выше, определяет полуплоскость с граничными прямыми: ai1x1 + ai2x2 + ai3x3 = bi,(i = 1, 2, ..., n), х1=0, х2=0. Линейная функция (2.1) при фиксированных значениях Z является уравнением прямой линии: С1х1 + С2х2 = const. Построим многоугольник решений системы ограничений (2.2) и график линейной функции (2.1) при Z = 0 (рис. 2.1). Тогда поставленной задаче линейного прграммирования можно дать следующую интерпретацию. Найти точку многоугольника решений, в которой прямая С1х1 + С2х2 = const опорная и функция Z при этом достигает минимума.
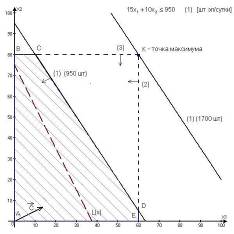
 Значения Z = С1х1 + С2х2 возрастают в направлении вектора N =(С1, С2), поэтому прямую Z = 0 передвигаем параллельно самой себе в направлении вектора Х. Из рис. 2.1 следует, что прямая дважды становится опорной по отношению к многоугольнику решений (в точках А и С), причем минимальное значение принимает в точке А. Координаты точки А (х1, х2) находим, решая систему уравнений прямых АВ и АЕ.
Значения Z = С1х1 + С2х2 возрастают в направлении вектора N =(С1, С2), поэтому прямую Z = 0 передвигаем параллельно самой себе в направлении вектора Х. Из рис. 2.1 следует, что прямая дважды становится опорной по отношению к многоугольнику решений (в точках А и С), причем минимальное значение принимает в точке А. Координаты точки А (х1, х2) находим, решая систему уравнений прямых АВ и АЕ.
 Если многоугольник решений представляет собой неограниченную многоуголь-ную область, то возможны два случая.
Если многоугольник решений представляет собой неограниченную многоуголь-ную область, то возможны два случая.
 Случай 1. Прямая С1х1 + С2х2 = const, передвигаясь в направлении вектора N или
противоположно ему, постоянно пересекает многоугольник решений и ни в какой точке не является опорной к нему. В этом случае линейная функция не ограничена на многоугольнике решений как сверху, так и снизу (рис. 2.2).
Случай 1. Прямая С1х1 + С2х2 = const, передвигаясь в направлении вектора N или
противоположно ему, постоянно пересекает многоугольник решений и ни в какой точке не является опорной к нему. В этом случае линейная функция не ограничена на многоугольнике решений как сверху, так и снизу (рис. 2.2).
Случай 2. Прямая, пере-двигаясь, все же становится опорной относительно многоу-гольника решений (рис. 2.2, а – 2.2, в). Тогда в зави-симости от вида области ли-нейная функция может быть ограниченной сверху и неограниченной снизу (рис. 2.2, а), ограниченной снизу и неограниченной сверху (рис. 2.2, б), либо ограниченной как снизу, так и сверху (рис. 2.2, в).

Похожие работы
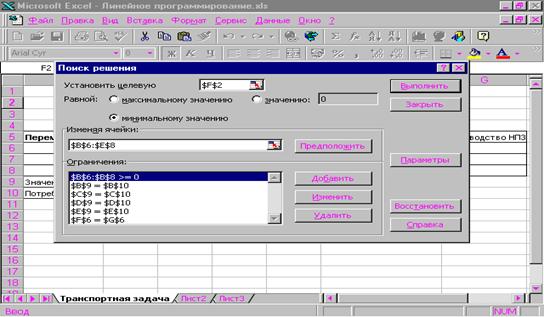
... ячеек свидетельствует о том, что возможно лучшее решение и наоборот, если отрицательных ячеек нет, то было найдено оптимальное решение. 2. Содержательная постановка задачи Частным случаем задачи линейного программирования является транспортная задача. Проблема транспортировки включает поиск низко затратных схем распределения товарных запасов от многих источников до многих мест назначения ...
... игр, теория массового обслуживания, и др. 1. ПОСТАНОВКА ЗАДАЧИ Целью нашего курсового проекта является решение задачи линейного программирования графическим методом. 1.1 Математическое программирование. Математическое программирование ("планирование") – это раздел математики, занимающийся разработкой методов отыскания экстремальных значений функции, на аргументы которой наложены ...
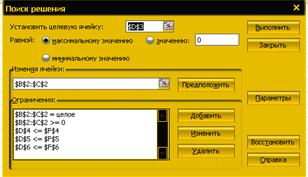
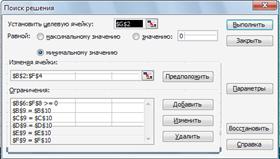
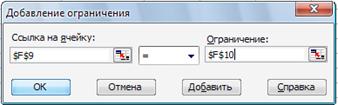
... с помощью двухэтапного метода, совпадает с решением, полученным в среде MS Excel с помощью программной надстройки «Поиск решения». 7. ПРИМЕРЫ ПОСТАНОВОК, ФОРМАЛИЗАЦИИ И РЕШЕНИЯ ПЕРСПЕКТИВНЫХ ОПТИМИЗАЦИОННЫХ УПРАВЛЕНЧЕСКИХ ЗАДАЧ Одним из методов решения задач линейного программирования является графический метод, применяемый для решения тех задач, в которых имеются только две переменные, ...
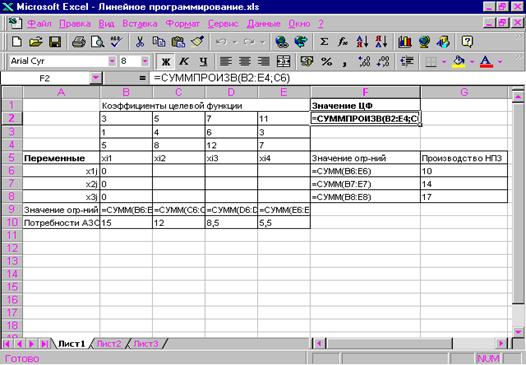
... . При этом значения cij соответствуют коэффициентам целевой функции исходной замкнутой транспортной задачи (1) и в последующем не изменяются. Элементы xij соответствуют значениям переменных промежуточных решений транспортной задачи линейного программирования и изменяются на каждой итерации алгоритма. Если в некоторой ячейке xij=0, то такая ячейка называется свободной, если же xij>0, то такая ...
0 комментариев