Навигация
1.9 Регулирование скорости
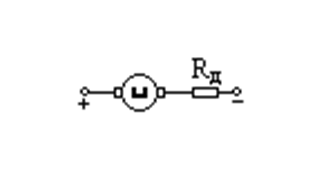
1.9.1 Реостатное регулирование скорости.
|
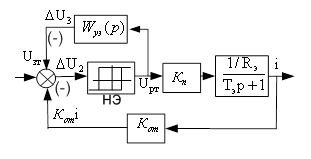
![]()
Рисунок 1.9.1.1
|
![]()
![]()
![]()
![]()
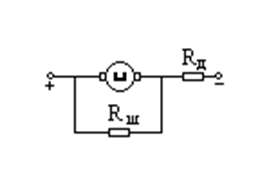
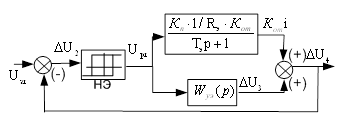
Рисунок 1.9.1.2
Подставим (1.9.1.5) в (1.9.1.3):
![]() .
.
Отсюда:
|
Подставим (1.9.1.2) и (1.9.1.6) в (1.9.1.4):
![]() .
.
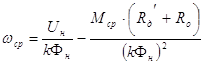
Выразим скорость
|

|

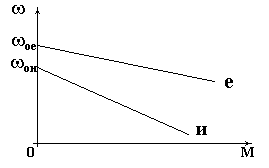
Рисунок 1.9.1.3 - Механические характеристики
Изображенные на рисунке 1.9.1.3 величины woe и woи равны соответственно
![]() ,
, ![]() .
.
Способ используют, где надо снизить скорость, но сохранить жесткость на искусственных характеристиках.
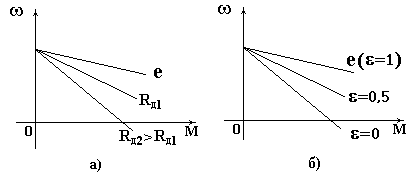
Рисунок 1.9.1.4 – Искусственные механические характеристики
1.9.2 Импульсное реостатное регулирование скорости.
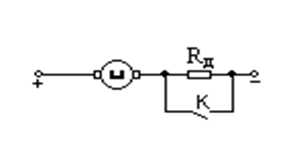
Рисунок 1.9.2.1
Рисунок 1.9.2.2 - Механические характеристики
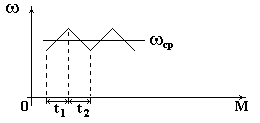
Рисунок 1.9.2.3
e - скважность управляющих импульсов:
![]() .
.
Соответственно e может принимать значения 0...1.
 ,
,
где
![]() .
.
Для осуществления способа используют транзисторные или тиристорные ключи.
1.9.3 Регулирование скорости изменением Ua .
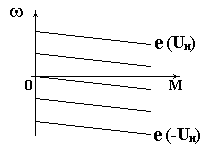
Рисунок 1.9.3.1 - Механические характеристики
Скорость
![]() ,
,
Причем ![]() и
и ![]() .
.
1.9.4 Регулирование скорости путем изменения потока возбуждения.
В связи с тем, что поле возбуждения создается постоянным магнитом, регулирование скорости путем уменьшения потока Ф неосуществимо.
1.10 Расчет потерь энергии.
Потери энергии в установившемся режиме определяются
![]() .
.
Потери энергии во время переходных процессов определяются
 .
.
Похожие работы
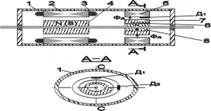
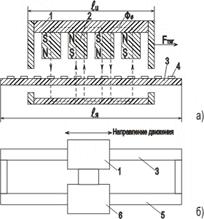
... может работать без полупроводникового коммутатора. В ряде случаев двигатели постоянного тока целесообразно делать линейными. На рис.5, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является ...

... напряжения (Invertor1), путевой датчик фазовый ПДФ (PDF). 6.1 Датчик положения ротора Рассмотрим структуру схемы по часовой стрелке, начиная с блока ПДФ, представленного на рис.6.2. Рис. 6.2 электропривод вентильный двигатель Входной величиной для ПДФ является угол поворота вала двигателя, а выходным сигналом – вектор из шести единичных импульсов, сдвинутых друг относительно друга на ...
... ранее компьютерных технологий, применяемых на этапах разработки объекта машиностроительного профиля, приведена в Приложении А. Глава 2. Современные компьютерные технологии при проектировании высокомоментного линейного привода с цифровым программным управлением Привод линейный синхронный представляет собой комплектный привод прямого действия на базе однокоординатного синхронного линейного ...
... электропривода Выводы Перечень ссылок РЕФЕРАТ Объект проектирования: электропривод с двигателем постоянного тока. Цель работы: выбрать электродвигатель по мощности, рассчитать и построить механические характеристики электропривода в рабочих режимах и электромеханические переходные процессы в электроприводе, разработать принципиальную электрическую схему электропривода. ЭЛЕКТРОПРИВОД, ...
0 комментариев