Навигация
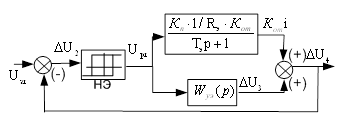
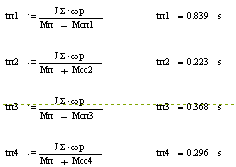
1.10.1 Пуск двигателя.
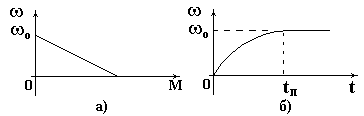
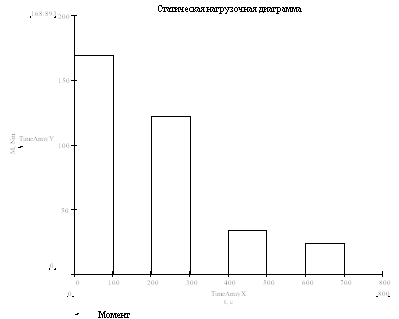
Рисунок 1.10.1.1
При Mc=0.
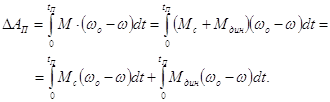
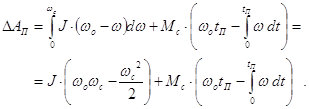
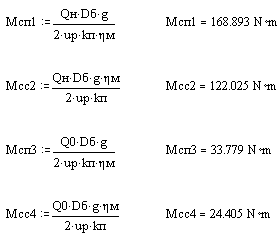
Значение динамического момента
![]() .
.
 ,
,
![]() .
.
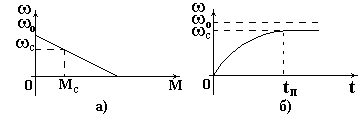
Рисунок 1.10.1.2
При Mc=const.
![]() ;
; ![]() .
.
![]()
![]()
![]()
Если Мс – мал, то
![]()
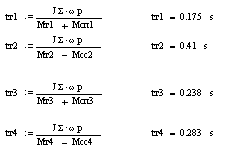
1.10.2 Динамическое торможение.
Мс=0 .
![]()
Mc=const.

2 ВЫБОР ВМД И ТАХОГЕНЕРАТОРА ДЛЯ ЛАБОРАТОРНОГО СТЕНДА. РАЗРАБОТКА ИМПУЛЬСНОГО ИСТОЧНИКА ПИТАНИЯ. ВЫБОР ПРИБОРОВ И УСТРОЙСТВ ИЗМЕРЕНИЯ И КОНТРОЛЯ
2.1 Выбор вмд и тахогенератора для лабораторного стенда
В зависимости от поставленной цели (задачи) определяем необходимую мощность, величину момента, который развивает двигатель и доступные к использованию источники питания, а также конструктивное исполнение высокомоментного двигателя, отвечающего требованиям данной задачи. Исходя из указанных параметров, а также учитывая располагаемое разработчиками оборудование, был выбран коллекторный моментный двигатель с неограниченным углом поворота ротора серии PIVT 6/3A.
Поскольку в данной лабораторной работе предусмотрен рпыт снятия механических характеристик, то необходим тахогенератор. Достоинством выбранной машины является то, что ее конструкция содержит тахогенератор в одном корпусе с двигателем.
2.2 Требуется рассчитать основные параметры широтно-импульсного модулятора, нагрузкой которого является цепь якоря двигателя постоянного тока. Номинальное напряжение якорной цепи двигателя 30 вольт.
Широтно-импульсный преобразователь предназначен для преобразования входного сигнала в прямоугольные импульсы. Схема ШИПа представлена в приложении. На вход генератора пилообразного напряжения (далее ГПН), изображенного в приложении 3, подается напряжение минус 15 вольт. В основе ГПН лежит компаратор. При подаче сигнала емкость С9 начинает заряжаться и на выходе компаратора DA5 формируется линейно нарастающий сигнал. В начальный момент времени транзистор VT9 заперт. Далее этот нарастающий сигнал поступает на вход компаратора DA6, где он сравнивается с напряжением задания (оно задается R36). В момент совпадения напряжений, на выходе компаратора DA6 появится импульс отрицательной полярности, который ограничивается стабилитронами VS1 и VS2. Этот импульс подается на базу транзистора VT12, который в начальный момент времени был открыт. Транзистор VT12 при поступлении сигнала закроется. Вследствие этого база транзистора VT9 окажется подключенной к источнику плюс 15 вольт. Транзистор VT9 откроется и емкость С9 окажется зашунтированной через VT9. В результате ГПН перестанет вырабатывать линейно нарастающий сигнал. Компаратор DA6 поменяет сигнал на выходе и откроется транзистор VT12. Транзистор VT9 снова окажется закрытым и ГПН опять начнет вырабатывать «пилу». Далее процесс повторяется.Пилообразное напряжение с ГПН подается на компаратор DA7, где оно сравнивается с напряжением управления (скважность) и на выходе компаратора DA7 формируется сигнал положительной и отрицательной полярности. Эти разнополярные сигналы будут отпирать транзисторы VT10 и VT11. В результате напряжения плюс и минус 15 вольт подаются на светодиоды гальванической развязки, основанной на оптоэлектронной интегральной микросхеме. С фотоприемника этот сигнал поступает на составной транзистор (схема Уилтона) VT18, VT22; VT21, VT17; VT23, VT19; VT24, VT20, где он усиливается и подается на базы транзисторов VT13, VT16 и VT15, VT14. Транзисторы VT13, VT16 и VT14, VT15 открываются попарно, подключая цепь якоря двигателя к источнику питания. С помощью изменения скважности сигнала (это делается переменным резистором R32) можно регулировать продолжительность по времени положительных и отрицательных импульсов.
2.3 Выбор элементов ШИПаВ качестве операционных усилителей DA6 и DA7 возьмем микросхему К157УД2. Операционный усилитель DA7 возьмем типа К140УД7.
Гальваническая развязка в силовой части осуществляется с помощью оптоэлектрических интегральных микросхем типа К262КП1Б (оптронный повторитель). Транзисторы в силовой цепи VT13¸VT16 выбираем типа КТ503В с данными:
Iк max и=350mA,
h21э=40…120,
Uкэ max=40В,
n-p-n – типа.
Выбираем диоды типа Д7А а данными:
Imax=300mA,
Uобр max=50В.
Все нерегулируемые резисторы типа МЛТ, регулируемые резисторы типа СПО-2.Конденсаторы типа К10У-5.
2.4 Выбор приборов и устройств измерения и контроляВ лабораторном стенде для снятия необходимых характеристик требуется наличие приборов измерения и контроля:
– амперметр на два предела измерения (1,5 и 15 ампер);
– вольтметр с пределом измерения 30 вольт;
– индикатор скорости на 3000 оборотов в минуту.
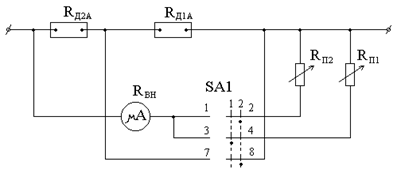
2.4.1 Для изготовления амперметра двух пределов измерения, берем за основу измерительную головку микроамперметра. Включая добавочные сопротивления, как это показано на рисунке 2.4.1, получаем необходимое измерительное устройство.
|
где RД – величина добавочного сопротивления;
В – требуемый предел измерения;
Д – число делений микроамперметра;
RВН – внутреннее сопротивление прибора.
Рассчет предела на 15 ампер![]()
Данное сопротивление изготовлено из манганиновой проволоки.
Рассчет предела на 1,5 ампера
![]()
Это сопротивление изготовлено из хромалевой проволоки.
Для обеспечения точности показаний, в схему включены подстроечные переменные резисторы, как это показано на рисунке 2.4.1 .
2.4.2 Вольтметр и измеритель скорости были изготовлены на базе измерительной головки микроамперметра, аналогично тому, что применен для изготовления амперметра.
Включая добавочные сопротивления, как это показано на рисунке 2.4.2, получили необходимые измерительные устройства.
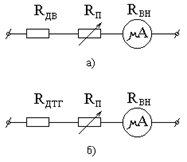
Рисунок 2.4.2
Расчет добавочных сопротивлений производится по формуле 2.4.1![]()
![]()
Эти сопротивления набраны из резисторов типа ОМЛТ, укаанных в приложении 1.
Для обеспечения точности показаний, в схему включены подстроечные переменные резисторы, как это показано на рисунке 2.4.2 .
2.4.3 Величина момента, развиваемого двигателем, фиксируется с помощью проградуированной шкалы и стрелки.
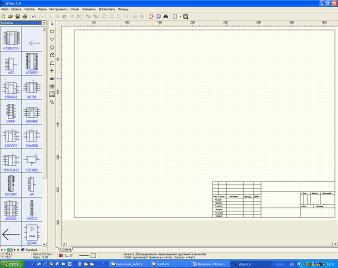
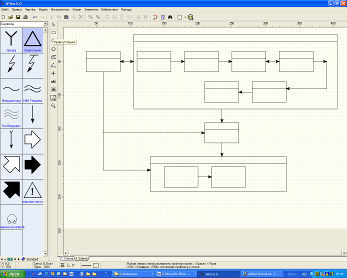
3 РАЗРАБОТКА И ИЗГОТОВЛЕНИЕ ПЕЧАТНОЙ ПЛАТЫ ШИРОТНО-ИМПУЛЬСНОГО ПРЕОБРАЗОВАТЕЛЯ
Под изготовлением печатной платы подразумевается ряд действий, посредством которых, при наличии электрической принципиальной схемы необходимого устройства (или его части), выбранных элементах схемы и известных источниках питания, получаем печатную плату этого устройства (или его части), работающая в соответствии с расчетными параметрами. Изготовление печатной платы было произведено в соответствии со следующим планом.
Похожие работы
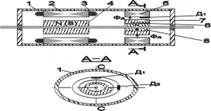
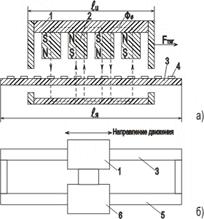
... может работать без полупроводникового коммутатора. В ряде случаев двигатели постоянного тока целесообразно делать линейными. На рис.5, а показана схема электромагнитной системы линейного бесконтактного двигателя. Корпус индуктора 1 выполнен из ферромагнитного материала и служит внешним магнитопроводом. В корпусе расположены постоянные магниты 2, создающие поток возбуждения Фв, индуктор является ...
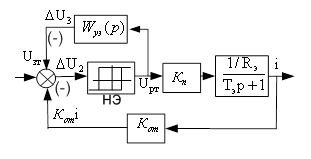

... напряжения (Invertor1), путевой датчик фазовый ПДФ (PDF). 6.1 Датчик положения ротора Рассмотрим структуру схемы по часовой стрелке, начиная с блока ПДФ, представленного на рис.6.2. Рис. 6.2 электропривод вентильный двигатель Входной величиной для ПДФ является угол поворота вала двигателя, а выходным сигналом – вектор из шести единичных импульсов, сдвинутых друг относительно друга на ...
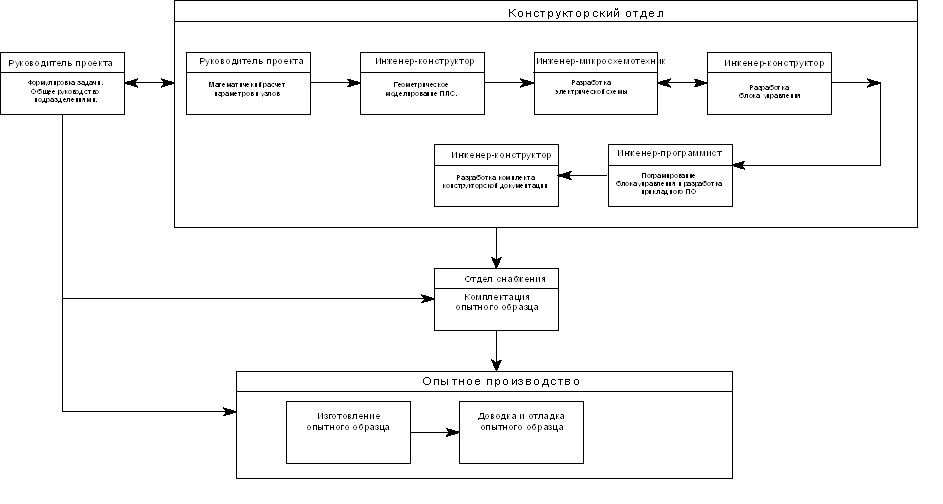
... ранее компьютерных технологий, применяемых на этапах разработки объекта машиностроительного профиля, приведена в Приложении А. Глава 2. Современные компьютерные технологии при проектировании высокомоментного линейного привода с цифровым программным управлением Привод линейный синхронный представляет собой комплектный привод прямого действия на базе однокоординатного синхронного линейного ...
... электропривода Выводы Перечень ссылок РЕФЕРАТ Объект проектирования: электропривод с двигателем постоянного тока. Цель работы: выбрать электродвигатель по мощности, рассчитать и построить механические характеристики электропривода в рабочих режимах и электромеханические переходные процессы в электроприводе, разработать принципиальную электрическую схему электропривода. ЭЛЕКТРОПРИВОД, ...
0 комментариев